
sales06@switek.biz

+86 186 5927 5869

Shopping

Subscrib to Us
sales06@switek.biz
+86 186 5927 5869
Shopping
Subscrib to Us
Keywords:IML Robot; IML Robot Operating; In Mold Labeling Robotics
Every time when you re-start the IML robot, it's very important to have the axis of the robotic arm back to the origin position. Here in this chapter you'll lean how to do the "ORG" of the IML robot before automatic running.
Toggle the knob in the upper left corner of the teach pendant to ORI, and the interface jumps to the origin screen:
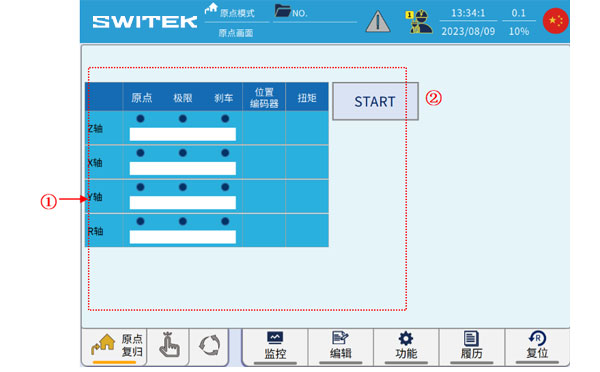
| No | Name | Function |
|---|---|---|
| (1) | Axis data |
|
| (2) | START key | Click to start the automatic return to origin action. |
In origin ORG mode, press the START button to start origin reset.


Contact SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right






