
sales06@switek.biz

+86 186 5927 5869

Đăng ký theo dõi chúng tôi
sales06@switek.biz
+86 186 5927 5869
Đăng ký theo dõi chúng tôi
Từ khóa:Robot IML; Vận hành Robot IML; Robot dán nhãn trong khuôn
Mục "Dạy học" là nơi bạn xem lại và chỉnh sửa chương trình của robot IML. Là một hệ thống điều khiển được thiết kế theo dạng mô-đun, sau khi chọn chế độ, cài đặt thông số, cài đặt bộ hẹn giờ, cài đặt bộ đếm, bạn sẽ nhận được một chương trình ban đầu cho dự án IML của mình. Trong trang "Dạy học", bạn có thể thực hiện một số điều chỉnh nhỏ chương trình để robot IML hoạt động hiệu quả hơn.
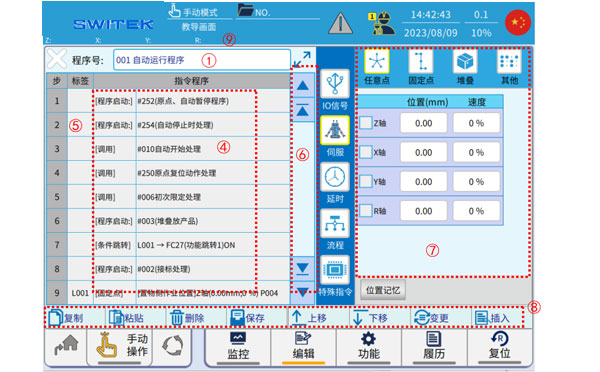
Mô tả từng khu vực đánh dấu:
| KHÔNG. | Tên | Chức năng |
|---|---|---|
| (1) | Chọn/Hiển thị chương trình | Nhấp vào cửa sổ bật lên "Danh sách chương trình", chọn số chương trình bạn muốn thêm, chỉnh sửa hoặc xem, rồi nhấp để vào giao diện chỉnh sửa. |
| (2) | Hiển thị phần mở rộng chương trình | Click  , enter the extended interface of the program display for easy observation of the complete command content. , enter the extended interface of the program display for easy observation of the complete command content. |
| (3) | Trở lại | Nhấp chuột để thoát khỏi giao diện chỉnh sửa hướng dẫn; nếu chương trình đã được thay đổi, hệ thống sẽ yêu cầu biên dịch lại. |
| (4) | Nội dung hướng dẫn | Nội dung của lệnh được hiển thị. |
| (5) | Cột nhãn | Chuyển đến khu vực chỉnh sửa của tab. Nhấp chuột để thêm nhãn trước dòng lệnh (khi tạo nhãn mới, bạn có thể nhấp vào "EN" mà không cần nhập số, và số nhãn chưa được sử dụng sẽ tự động được thêm vào). |
| (6) | Danh sách hướng dẫn cấp độ đầu tiên |
|
| (7) | Danh sách lệnh phụ và cài đặt tham số | Chỉnh sửa lệnh trong danh sách con và thiết lập tham số. |
| (8) | Phím tắt chỉnh sửa lệnh |
|
| (9) | Hiển thị vị trí trục | Vị trí hiện tại của mỗi trục được hiển thị để dễ dàng quan sát. |
Dưới đây là chi tiết về cách "dạy" chương trình cho robot IML:
Nhấp chuột vào khu vực hiển thị tên chương trình để vào danh sách chương trình.
Giao diện như sau:
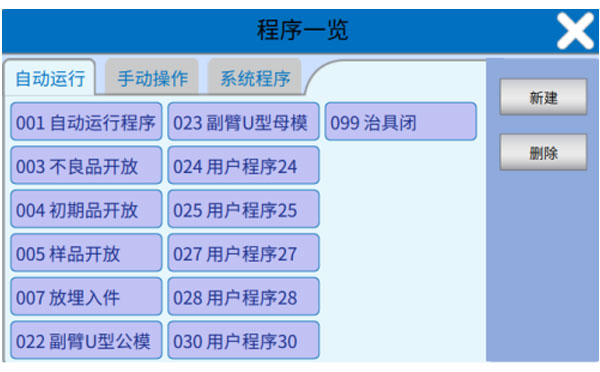
Autorun (001-099): 001 là chương trình chính mà người dùng có thể chỉnh sửa, 024-083 là các chương trình con do người dùng tạo và chỉnh sửa.
Thao tác thủ công (#178-#249):
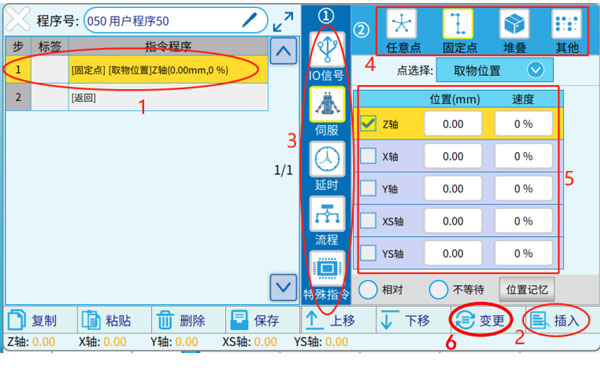
Giao diện chỉnh sửa được hiển thị trong hình trên, và dòng lệnh mới được chia thành 6 bước sau:
Dưới đây là một số lệnh được sử dụng phổ biến nhất:
Khi dạy lập trình ứng dụng, không nên khuyến khích người dùng chỉnh sửa logic điểm X và Y cơ bản cho việc điều khiển I/O tiêu chuẩn của máy ép phun và tay máy (ở đây là IML Robot), mà nên gọi các chương trình con của hệ thống để đảm bảo tính chính xác của chương trình. Các chương trình con này được đặt trong lớp "Tín hiệu I/O".
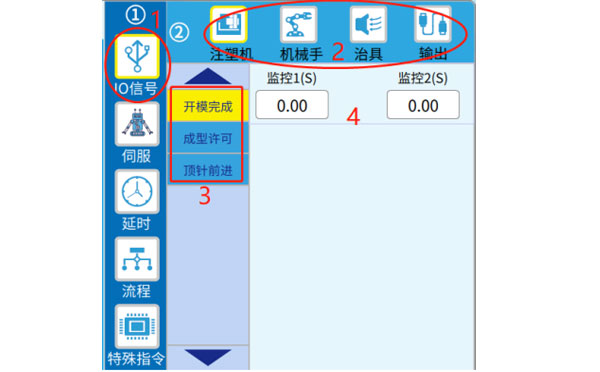
Như hình trên, các bước lập trình được thiết lập từng bước theo 1 (Danh mục chính), 2 (Danh mục phụ), 3 (Hướng dẫn cụ thể) và 4 (Tham số cụ thể), và sau khi hoàn thành, hãy nhấp vào "Thay đổi" hoặc "Thêm".
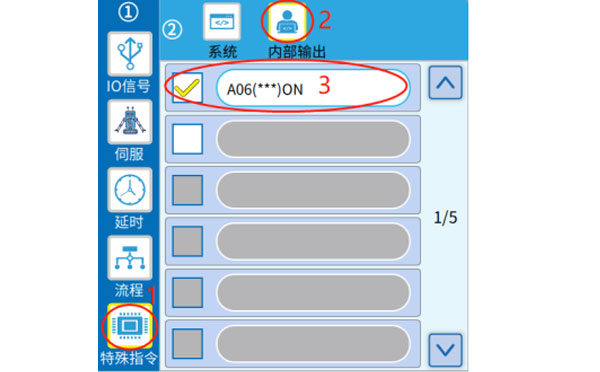
Khi chỉnh sửa các chức năng tiện ích liên quan đến robot IML, bạn có thể sử dụng các nút trong hình sau để vận hành các thiết bị liên quan đến robot IML (Bạn có thể quan sát trạng thái BẬT/TẮT của tín hiệu cảm biến bằng cách bật hoặc tắt chấm tròn ở bên phải  ), điều này giúp thuận tiện hơn cho việc lập trình mô phỏng các tình huống hoạt động thực tế.
), điều này giúp thuận tiện hơn cho việc lập trình mô phỏng các tình huống hoạt động thực tế.

Để chỉnh sửa logic đầu ra của điểm I/O, giao diện chỉnh sửa như sau:
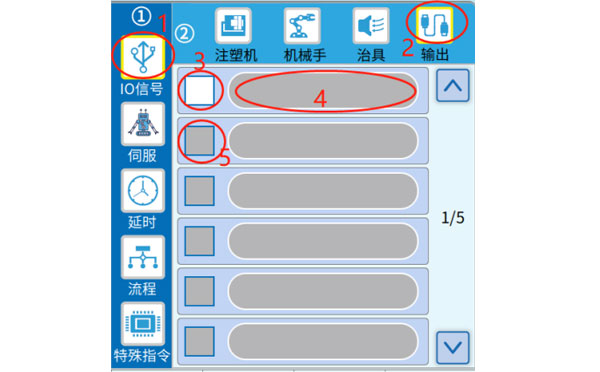
Trong giao diện chỉnh sửa của hình trên, nhấp vào nhãn số 3 để →, đánh dấu 4 sẽ trở nên có thể chỉnh sửa, chọn Điểm Y BẬT hoặc TẮT để xuất ra và xác nhận. Nếu bạn muốn xuất đồng thời các điểm Y của robot IML, tại ký hiệu 5, → bắt đầu chỉnh sửa đầu ra của điểm Y thứ hai. Khi hoàn tất, nhấp vào "Thay đổi" hoặc "Chèn".
Chỉnh sửa các lệnh di chuyển của trục servo, bao gồm di chuyển đến một điểm cố định (điểm được xác định, có thể được sửa đổi trong mục "Cài đặt vị trí" và có thể được tham chiếu), bất kỳ điểm nào, điểm xếp chồng (vị trí được đặt trong mục "Xếp chồng" trong menu), và lệnh đưa trục trở lại điểm gốc, v.v. Lấy một điểm cố định làm ví dụ:
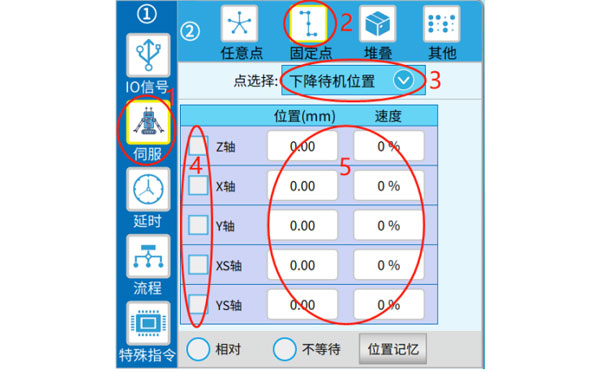
Như hình minh họa ở trên, chọn điểm cụ thể tại nhãn 3, sau đó chọn trục cần chạy tại nhãn 4, và đặt điểm và tốc độ tại nhãn 5. Khi hoàn tất, hãy nhấp vào "Thay đổi" hoặc "Chèn".
Có hai loại lệnh trì hoãn chỉnh sửa: chỉ định thời gian và chỉ định bộ hẹn giờ (thời gian hẹn giờ có thể được thay đổi khi nó chạy tự động).
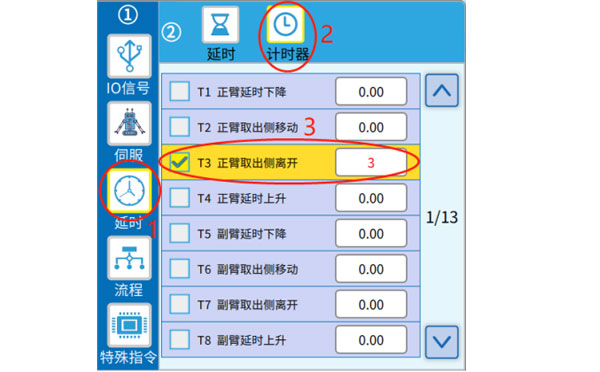
Lưu ý: Nếu bạn muốn sử dụng bộ đếm thời gian khi dạy lập trình, hãy ưu tiên các loại T85-T100, đây là các bộ đếm thời gian do người dùng tự thiết kế và không được định nghĩa cụ thể.
Việc gọi hàm và khởi động chương trình đều là những cách sử dụng chương trình con. Sự khác biệt là khi một chương trình con được gọi, nó chờ cho đến khi việc thực thi lệnh trong chương trình con kết thúc (lệnh "return"), và lời gọi được coi là hoàn tất, và lệnh tiếp theo có thể được thực thi trong chương trình chính. Mặt khác, bạn không cần phải đợi chương trình con khởi động được thực thi, và bạn có thể trực tiếp bắt đầu bước tiếp theo của chương trình chính (chương trình chính và chương trình con được thực thi song song).
Các bước để chỉnh sửa lệnh khởi động chương trình như sau:
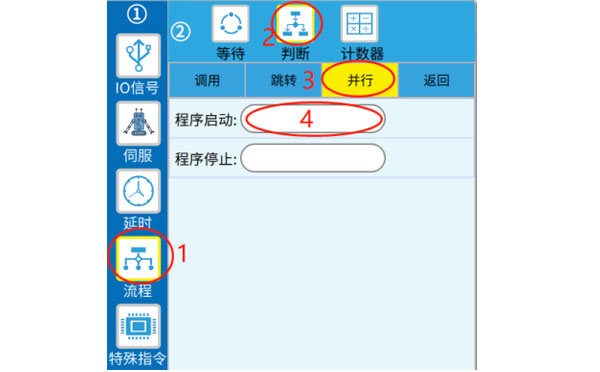
Lưu ý: Chương trình khởi chạy chương trình con đang mở, chương trình con này có thể được đóng bằng lệnh "Dừng chương trình" ở trên (trong điều kiện bình thường, chương trình con sẽ tự động được đóng sau khi quá trình thực thi hoàn tất và lệnh "return" được thực thi). Các bước để chỉnh sửa lệnh gọi chương trình như sau:
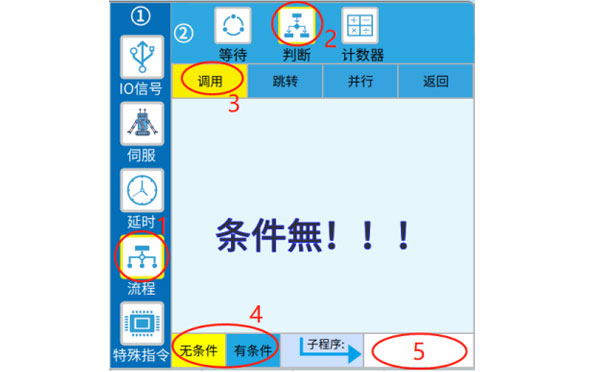
Như hình số 4 ở trên, khi chỉnh sửa lệnh gọi, bạn có thể chọn có đặt điều kiện hay không, chọn "vô điều kiện", sau đó đặt số chương trình con cần gọi tại dấu 5 để hoàn tất lệnh gọi. Nếu bạn chọn "có điều kiện", bạn cần hoàn tất thiết lập điều kiện trước, sau đó đặt số chương trình tại nhãn 6 và nhấp vào "Thay đổi" hoặc "Chèn".
Lưu ý rằng khi phán đoán điều kiện trước đó không đúng, lệnh gọi tiếp theo sẽ không được thực thi, nhưng dòng lệnh tiếp theo sẽ được bắt đầu.
Lệnh nhảy: Chương trình được thực thi đến lệnh nhảy, và bước tiếp theo sẽ thực thi dòng lệnh với thẻ tương ứng, thay vì thực thi theo thứ tự tiếp theo.
Đối với lệnh nhảy/nhảy có điều kiện, các bước chỉnh sửa lệnh như sau:

Chọn xem bạn muốn đặt điều kiện trong nhãn 4, đặt điều kiện trong nhãn 5 (bạn có thể đặt nhiều điều kiện), đặt số nhãn trong nhãn số 6, và chọn "Thay đổi" hoặc "Chèn" để tạo lệnh. Sau đó điền vào cột nhãn được hiển thị trong nhãn số 7, trước dòng lệnh mục tiêu.
Nếu sử dụng lệnh nhảy "có điều kiện", phán đoán điều kiện trước đó không hợp lệ và lệnh nhảy tiếp theo sẽ không được thực thi, và dòng lệnh tiếp theo sẽ được bắt đầu trực tiếp. Nếu điều kiện đúng, hãy chạy dòng lệnh nhảy đến nhãn.
Kết quả đầu ra của cờ nội bộ là BẬT/TẮT, và quy trình chỉnh sửa được hiển thị trong biểu tượng số bên dưới.
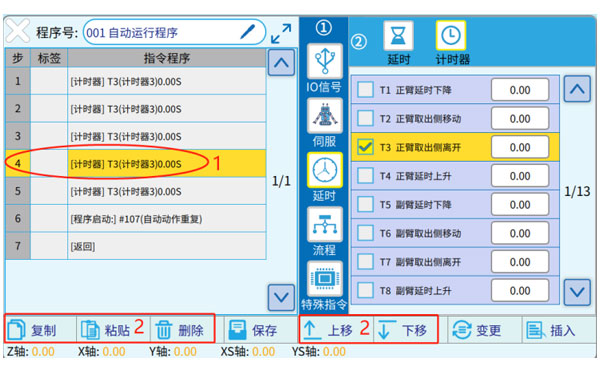
Như hình minh họa số 1 ở trên, hãy chọn dòng lệnh bạn muốn chỉnh sửa (chuyển sang màu vàng) rồi sử dụng nút có nhãn 2 để thực hiện thao tác. Chức năng của mỗi nút như sau:
Khi chương trình được chỉnh sửa, bạn có thể nhấp vào "Lưu" hoặc " " hoặc chuyển đến các trang cài đặt khác để kích hoạt lời nhắc "Biên dịch", nhấp vào "Có" và đợi quá trình chỉnh sửa hoàn tất (nó sẽ được tự động lưu sau khi biên dịch).
" hoặc chuyển đến các trang cài đặt khác để kích hoạt lời nhắc "Biên dịch", nhấp vào "Có" và đợi quá trình chỉnh sửa hoàn tất (nó sẽ được tự động lưu sau khi biên dịch).

Chuyển núm xoay ở góc trên bên trái của bộ điều khiển cầm tay sang chế độ TỰ ĐỘNG để vào giao diện vận hành tự động. Vào phần lập trình, như hình bên dưới, và nhấp vào biểu tượng "" được hiển thị trong nhãn 1, vào màn hình hiển thị mở rộng. Nhấp vào nhãn 2 "Bước đơn" để vào trạng thái bước đơn, nhấn nút nhãn 3  " một lần, và chương trình sẽ chuyển xuống bước 1.
" một lần, và chương trình sẽ chuyển xuống bước 1.
Tiến trình của chương trình có thể được xem ở mục số 4, "Số chương trình" là số thứ tự của chương trình đang được thực thi, và "Số bước" là số thứ tự của chương trình đang được thực thi.



Liên hệ SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right






