
sales06@switek.biz

+86 186 5927 5869

Đăng ký theo dõi chúng tôi
sales06@switek.biz
+86 186 5927 5869
Đăng ký theo dõi chúng tôi
Keywords:IML Robot; IML Robot Operating; In Mold Labeling Robotics
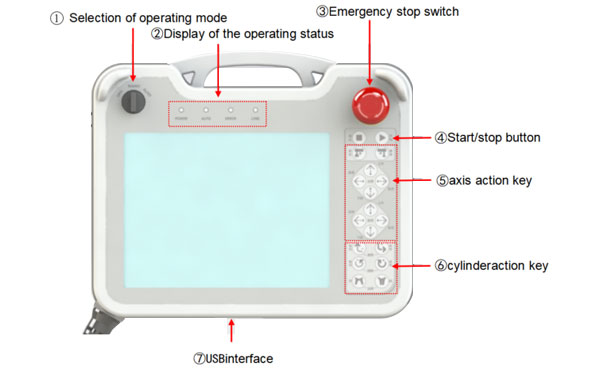
Bộ điều khiển treo của robot IML cung cấp giao diện người máy (HMI) dễ sử dụng cho người vận hành robot IML để khởi động hệ thống, lập trình hoặc chẩn đoán hệ thống IML. Trong chương này, chúng tôi sẽ giúp bạn hiểu rõ hơn về hộp điều khiển robot IML và chức năng của từng bộ phận trong bộ điều khiển treo.
Mặt trước:
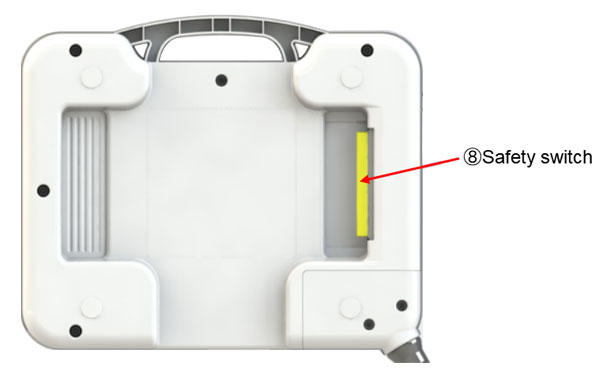
Mặt sau:
| KHÔNG. | Tên | Chức năng |
|---|---|---|
| 1 | Lựa chọn chế độ hoạt động | Chuyển đổi giữa chế độ gốc/thủ công/tự động |
| 2 | Hiển thị trạng thái hoạt động |
|
| 3 | Công tắc dừng khẩn cấp | Nút dừng khẩn cấp của robot giao hàng. Để mở nút dừng khẩn cấp, xoay chìa khóa theo chiều kim đồng hồ. |
| 4 | Nút khởi động/dừng | Khởi động/tạm dừng hoạt động tự động. |
| 5 | Phím hành động trục | Nhờ công tắc an toàn, năm trục có thể di chuyển theo cả hướng dương và âm. |
| 6 | Khóa tác động hình trụ | Nhờ công tắc an toàn, hoạt động của xi lanh được kiểm soát. |
| 7 | Giao diện USB | Giao diện giao tiếp để tải lên và tải xuống dữ liệu trên bộ điều khiển cầm tay. |
| 8 | Công tắc an toàn | Trong quá trình thao tác thủ công, nếu nhấn giữ phím này, tất cả các thao tác của phím thao tác thủ công đều có thể được thực hiện. |
TSM-1000P:
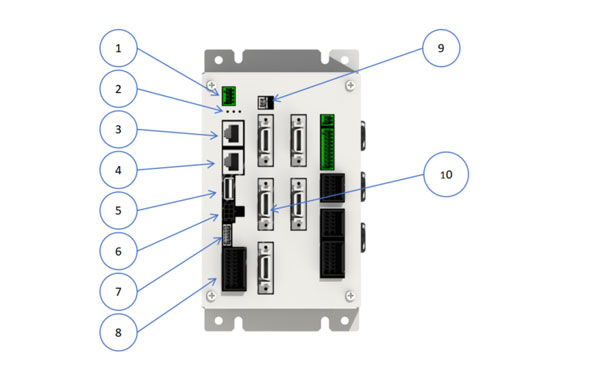
Mô tả chi tiết cách đấu dây:
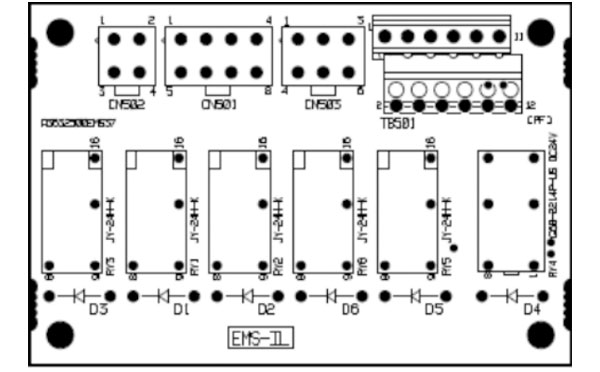
CN501:
| GHIM | Nhãn | Tên | Ghi chú |
|---|---|---|---|
| 1 | X00 | Tín hiệu nâng tay M | Kết nối dây với TIO-A |
| 2 | X07 | Tín hiệu nâng cần S | Kết nối dây với TIO-A (ngắn mạch khi dùng chế độ ba trục) |
| 3 | X18 | Khu vực đặt | Kết nối dây với TIO-A |
| 4 | 24G | 24G | Không có dây dẫn |
| 5 | 24G | 24G | |
| 6 | 24G | 24G | |
| 7 | 24G | 24G | |
| 8 | 24G | 24G |
CN502:
| GHIM | Nhãn | Tên | Ghi chú |
|---|---|---|---|
| 1 | RY2 | Ngõ ra rơle (không sử dụng) | không được sử dụng |
| 2 | 24V | 24V | Kết nối nguồn L+ |
| 3 | 24G | 24G | |
| 4 | 24G | 24G | Kết nối nguồn L- |
CN503:
| GHIM | Nhãn | Tên | Ghi chú |
|---|---|---|---|
| 1 | MP_ON_1 | Động cơ servo bật | Kết nối cổng I/O trên bộ điều khiển (MOT) |
| 2 | EMS_1 | Đầu ra tín hiệu EMS | |
| 3 | EMS_SW_1 | Đầu vào tín hiệu EMS | |
| 4 | MP_ON_2 | Bộ điều khiển servo bật | |
| 5 | EMS_2 | Đầu ra tín hiệu EMS | |
| 6 | EMS_SW_2 | Đầu vào tín hiệu EMS |
TB501:
| GHIM | Nhãn | Tên | Ghi chú |
|---|---|---|---|
| 1 | EMS OUT1 | Máy bán hàng tự động EMS đầu ra 1 | Nối dây cáp số 23 (dây cáp nối với máy ép phun) |
| 2 | EMS OUT2 | Máy bán hàng tự động EMS đầu ra 2 | Kết nối đường dây cáp 24 |
| 3 | Y35 | Cho phép đóng MLD | Kết nối chân PIN 2 trong CN302 trên PIO |
| 4 | Y35 | Cho phép đóng MLD | Kết nối chân PIN6 vào CN302 trên PIO |
| 5 | Y35 | Cho phép đóng MLD | Kết nối dây cáp 10 |
| 6 | Y35 | Cho phép đóng MLD | Kết nối dây cáp số 11 |
| 7 | EMSIN_1(24V) | Đầu vào tín hiệu EMS bên ngoài 1 | Vui lòng kết nối chân PIN7 và PIN8 khi không sử dụng tín hiệu dừng khẩn cấp bên ngoài. |
| 8 | EMSIN1_1 | Đầu vào tín hiệu EMS bên ngoài 1 | |
| 9 | EMSIN1_2 | Đầu vào tín hiệu EMS bên ngoài 2 | Vui lòng kết nối chân PIN9 và PIN10 khi không sử dụng tín hiệu dừng khẩn cấp bên ngoài. |
| 10 | EMSIN1_2 | Đầu vào tín hiệu EMS bên ngoài 2 | |
| 11 | EMSIN1_3 | Đầu vào tín hiệu EMS bên ngoài 3 | Vui lòng kết nối chân PIN11 và PIN12 khi không sử dụng tín hiệu dừng khẩn cấp bên ngoài. |
| 12 | EMSIN1_3 (24G) | Đầu vào tín hiệu EMS bên ngoài 3 |


Liên hệ SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right






