
sales06@switek.biz

+86 186 5927 5869

Đăng ký theo dõi chúng tôi
sales06@switek.biz
+86 186 5927 5869
Đăng ký theo dõi chúng tôi
Từ khóa:Robot IML; Vận hành Robot IML; Robot dán nhãn trong khuôn
Việc thiết lập các thông số cơ khí của robot IML bao gồm việc lựa chọn mô-đun của bộ phận chức năng, thông số cơ khí của trục, động cơ servo, v.v. để đảm bảo robot IML hoạt động an toàn và hiệu quả.
Lựa chọn mô hình

| KHÔNG. | Tên | Chức năng |
|---|---|---|
| (1) | Lựa chọn mô hình | Nhấp vào đây để chọn tên chế độ phù hợp. |
| (2) | Cứu | Sau khi chọn (1) mô hình, hãy nhấp vào "Lưu" để xác nhận thao tác. |
| (3) | Thông tin của mẫu đã chọn được hiển thị. | Phần thông tin này được hiển thị cho các mô hình để giúp bạn phân biệt giữa chúng. (Phần thông tin này trong mô hình cần được duy trì trong quá trình sản xuất để đảm bảo tính chính xác.) |
Xin lưu ý rằng thao tác trên, chọn mô hình - lưu, sau khi hoàn tất nội dung mô hình sẽ không có hiệu lực ngay lập tức, cần phải khởi tạo các thông số cơ khí, thông số servo - lưu, và sau đó khởi động lại hệ thống thì mới có hiệu lực.
Thông số cơ học

| KHÔNG. | Tên | Chức năng |
|---|---|---|
| (1) | Khởi tạo | Nhấp vào đó sẽ đọc dữ liệu ban đầu của các thông số cơ học trong tệp mô hình và phản hồi lại cho màn hình tại (4). |
| (2) | Cứu | Lưu các thay đổi hiện có |
| (3) | Trang | Các thông số được cuộn lên xuống. |
| (4) | Nội dung thông số cơ học |
|
Xin lưu ý rằng việc thay đổi các thông số trên sẽ không có hiệu lực ngay lập tức mà cần được lưu lại, và chỉ có hiệu lực sau khi hệ thống khởi động lại.
Thông số lái xe

| KHÔNG. | Tên | Chức năng |
|---|---|---|
| (1) | Khởi tạo | Nhấp vào đó sẽ đọc dữ liệu ban đầu của các thông số truyền động trong tệp mô hình và phản hồi lại cho màn hình tại (4). |
| (2) | Cứu | Lưu các thay đổi hiện có. |
| (3) | Trang | Các thông số được cuộn lên xuống. |
| (4) | Nội dung tham số ổ đĩa | Mỗi thông số của trình điều khiển đều được chỉnh sửa và hiển thị. |
Hướng dẫn thiết lập một số thông số của ổ đĩa:
| KHÔNG. | Tên | Tác dụng | Giá trị ban đầu | Phạm vi | Đơn vị | Điểm chính của bối cảnh | |
|---|---|---|---|---|---|---|---|
| PA1-02 | Lựa chọn hệ thống INC/ABS | Khởi động lại | 0 | 0~1 | "0" là động cơ tăng dần, "1" là động cơ tuyệt đối. | ||
| PA1-04 | Hướng quay | Khởi động lại | 0 | 0~1 | Điều chỉnh khi động cơ quay sai hướng. | ||
| PA1-13 | Chế độ điều chỉnh | Thời gian thực | 0 | 0~2 | 0 là tự động, 1 là bán tự động, 2 là thủ công. Robot được cài đặt ở chế độ 1 khi xuất xưởng. | ||
| PA1-14 | Tỷ lệ tải trọng trên mô-men xoắn | Thời gian thực | 23.0 | 0.0~300 | Thời báo | ||
| PA1-15 | Tăng điều chỉnh | Thời gian thực | 7 | 1~40 | |||
| PA1-27 | Giá trị giới hạn mô-men xoắn thuận | Thời gian thực | 300 | 0~500 | |||
| PA1-28 | Giá trị giới hạn mô-men xoắn âm | Thời gian thực | 300 | 0~500 | |||
| PA1-52 | Thời gian thực | Thời gian thực | 0.0 | 0.0~1000.0 | |||
| PA1-54 | Một số lượng cố định các câu trả lời lệnh vị trí | Thời gian thực | 30.0 | 0.00~250.00 | |||
| PA1-55 | Vị trí Vòng Tăng 1 | Thời gian thực | 17 | 1~2000 | |||
| PA1-56 | Tăng tốc độ vòng 1 | Thời gian thực | 5 | 1~2000 | |||
| PA1-58 | Hệ số khuếch đại phản hồi 1 | Thời gian thực | 0.000 | 0.000~1.500 | |||
| PA1-59 | Lọc mô-men xoắn | Khởi động lại | 0.00 | 0.00~20.00 | |||
| PA1-70 | Chế độ lọc notch | Thời gian thực | 1 | 0~1 | Khi bằng 0, việc tự động phát hiện 1 là hợp lệ cho giá trị đã đặt. | ||
| PA1-71 | Số tần số Notch 1 | Thời gian thực | 134 | 10~4000 | |||
| PA1-72 | Suy giảm Notch 1 | Thời gian thực | 1 | 0~40 | |||
| PA1-73 | Chiều rộng rãnh 1 | Thời gian thực | 2 | 0~3 | |||
| PA1-74 | Số tần số Notch 2 | Thời gian thực | 53 | 10~4000 | |||
| PA1-75 | Suy giảm Notch 2 | Thời gian thực | 1 | 0~40 | |||
| PA1-76 | Chiều rộng rãnh 2 | Thời gian thực | 2 | 0~3 | |||
| PA1-78 | Tần số số 0 của hiện tượng chống cộng hưởng phanh | Thời gian thực | 7.0 | 1~300.0 | Hz | Việc giảm rung có hiệu quả khi dừng xe, và cần phải đo độ rung thực tế trước khi thiết lập. | |
| PA1-79 | Tỷ lệ quán tính rung phanh | Thời gian thực | 0 | 0~80 | Nếu được đặt thành 0, PA1-78 sẽ không hợp lệ, và khi được đặt thành 1, PA1-78 sẽ hợp lệ. | ||
| PA1-80 | Tần số số 1 của hiện tượng chống cộng hưởng phanh | Thời gian thực | 8.0 | 1~300.0 | Hz | Việc giảm rung có hiệu quả khi dừng xe, và cần phải đo độ rung thực tế trước khi thiết lập. | |
| PA1-81 | Tỷ lệ quán tính rung phanh | Thời gian thực | 0 | 0~80 | Nếu giá trị được đặt là 0, PA1-80 không hợp lệ, và khi được đặt là 1, PA1-80 hợp lệ. | ||
| PA1-94 | Chế độ lọc mô-men xoắn | Khởi động lại | 0 | 0~1 | Đặt về 0 và không sử dụng bộ lọc mô-men xoắn. | ||
| PA2-64 | Thời gian hành động phanh | Thời gian thực | 0 | 0.00~99.9 | Sec | ||
| PA2-65 | lựa chọn kháng cự ngược | Khởi động lại | 1 | 0~1 | Đặt giá trị 1 khi điện trở tái tạo được kết nối và 0 khi không được kết nối. | ||
| PA2-69 | Độ lệch so với giá trị được phát hiện | Thời gian thực | 15.0 | 0.1~100.1 | Rev | ||
| PA3-79 | Thiết lập giá trị trở kháng ngược | Thời gian thực | 30.0 | 3.9~160.0 | Ω | Giá trị của điện trở tái tạo được thiết lập. | |
| PA3-80 | Cài đặt công suất trở kháng hồi sinh | Thời gian thực | 40 | 1~5000 | W | Thiết lập khả năng kháng cự hồi tố | |
Chế độ cài đặt và điều chỉnh dễ dàng

| KHÔNG. | Tên | Chức năng |
|---|---|---|
| (1) | Lựa chọn trục | Nhấp chuột để chọn trục bạn muốn thao tác. |
| (2) | Tự động chỉnh âm | Khi máy được hiệu chỉnh trước khi xuất xưởng, các thông số truyền động có thể được suy ra ở chế độ này. |
| Điều chỉnh bán tự động | Chế độ điều chỉnh bán tự động, một số thông số được cố định, và một số thông số khác sẽ được tinh chỉnh. | |
| Điều chỉnh thủ công | Tất cả các thông số truyền động đều được cố định. | |
| (3) | Đặt giá trị | Tỷ lệ giữa độ lợi đã được điều chỉnh và quán tính trên mô-men xoắn hiện đang được sử dụng. |
| (4) | Giá trị được tính toán | Giá trị thu được từ phép tính hiện tại. |
| (5) |  | Áp dụng nội dung Giá trị đã tính toán vào Giá trị đã thiết lập. |
| (6) |  | Áp dụng nội dung của "Giá trị đặt" cho "Giá trị tính toán". |
| (7) | Cứu | Chỉnh sửa và lưu các thông số trình điều khiển hiện tại. |
Khi ở chế độ tự động, bạn có thể chuyển đổi chế độ điều chỉnh của từng trục trên giao diện này, sửa đổi tỷ lệ mô-men quán tính và hệ số điều chỉnh, để quan sát hiệu quả hoạt động của các giá trị đã đặt trong thời gian thực và tìm ra các thiết lập tham số hợp lý hơn.
Khi được đặt ở chế độ tự điều chỉnh, tỷ lệ mô-men xoắn quán tính PA1-14 được đo trong thời gian thực.
Chức năng chính của chế độ điều chỉnh tự động là tự động điều chỉnh giá trị theo hiệu quả vận hành khi các thông số vận hành phù hợp chưa được biết ở giai đoạn gỡ lỗi ban đầu, cho đến khi hiệu quả vận hành tốt và ổn định, và giá trị tỷ lệ quán tính-mô-men xoắn có xu hướng ổn định.
Khi hiệu suất hoạt động ổn định, hãy chuyển sang chế độ điều chỉnh bán tự động, thiết lập các thông số thủ công, lưu lại, tắt nguồn và khởi động lại trước khi các thông số có hiệu lực. Ở chế độ điều chỉnh bán tự động, các thông số chính như "tỷ lệ mô-men quán tính" sẽ được cố định, và một số thông số servo vẫn sẽ được điều chỉnh theo thời gian thực để đảm bảo hoạt động trơn tru.
Khi được đặt ở chế độ "Điều chỉnh thủ công", tất cả các thông số servo đều được cố định. Chế độ này đòi hỏi độ chính xác cao trong việc thiết lập các thông số.
Thiết lập dễ dàng - Cài đặt bộ lọc Notch

| KHÔNG. | Tên | Chức năng |
|---|---|---|
| (1) | Lựa chọn trục | Nhấp chuột để chọn trục bạn muốn thao tác. |
| (2) | Lọc thích ứng | Chức năng lọc thích ứng, bật/tắt. |
| (3) | Các tham số liên quan đến lọc notch | Các thông số khác nhau liên quan đến chức năng lọc notch. |
Nếu có tiếng rít chói tai ở bộ servo khi đang bật hoặc trong quá trình hoạt động, có thể bật bộ lọc thích ứng, bộ lọc này sẽ tự động loại bỏ âm thanh bất thường do cộng hưởng cơ học gây ra và có thể loại bỏ hai điểm cộng hưởng. Khi tần số cộng hưởng được đặt ở mức 4000, sẽ không có điểm cộng hưởng nào.
Dễ dàng thiết lập - Cài đặt kiểm soát rung động
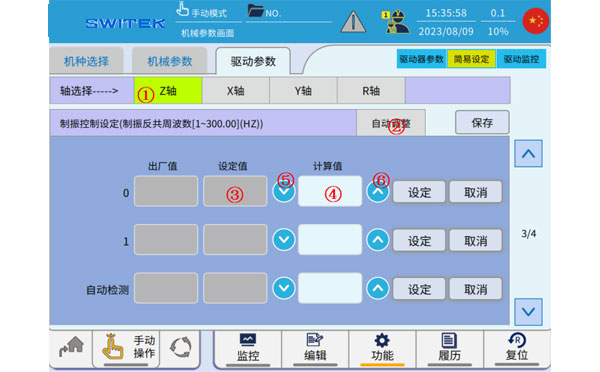
| KHÔNG. | Tên | Chức năng |
|---|---|---|
| (1) | Lựa chọn trục | Chọn trục bạn muốn thao tác. |
| (2) | Tự động điều chỉnh | Các thông số liên quan của hệ thống điều khiển rung được thiết lập sẽ được tự động phát hiện. |
| (3) | Đặt giá trị | Các thông số điều khiển rung động hiện đang được sử dụng. |
| (4) | Giá trị được tính toán | Tính giá trị số thu được. |
| (5) | | Áp dụng nội dung Giá trị đã tính toán vào Giá trị đã thiết lập. |
| (6) | | Áp dụng nội dung của "Giá trị đặt" cho "Giá trị tính toán". |
Cài đặt kiểm soát rung động: Chức năng này có hiệu quả trong việc triệt tiêu rung động khi dừng xe, giá trị cài đặt thông thường là 5-10. Giá trị cài đặt có thể được tính toán sơ bộ dựa trên dạng sóng mô-men xoắn, và rất khó để cài đặt chính xác ngay lần đầu tiên.
Cài đặt dễ dàng - Phát hiện va chạm

| KHÔNG. | Tên | Chức năng |
|---|---|---|
| (1) | Lựa chọn trục | Lựa chọn trục để thiết lập |
| (2) | Biến thiên mô-men xoắn tối đa |


Liên hệ SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right






