
sales06@switek.biz

+86 186 5927 5869

Đăng ký theo dõi chúng tôi
sales06@switek.biz
+86 186 5927 5869
Đăng ký theo dõi chúng tôi
Keywords:IML Robot; IML Robot Operating; In Mold Labeling Robotics
Màn hình của bộ điều khiển treo là giao diện của robot IML, từ đó người vận hành sẽ điều khiển và lập trình robot IML. Trong chương này, chúng ta sẽ giới thiệu cách lập trình và thiết lập các thông số của robot IML. Dưới đây là giao diện của robot IML sau khi cấp nguồn và tải hệ thống để bạn tham khảo:

Xoay núm điều chỉnh ở góc trên bên trái của điện thoại sang chế độ MANU, giao diện sẽ hiển thị như sau:
(1)Hoạt động trục
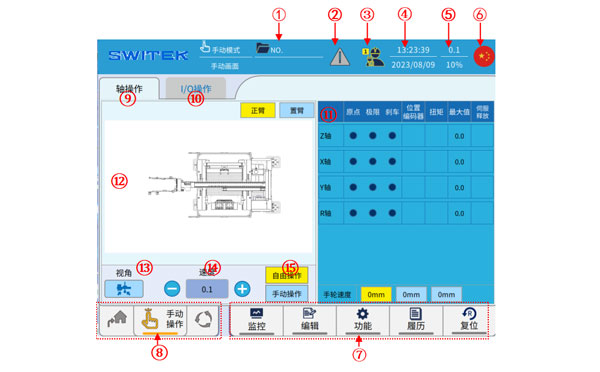
Danh sách chức năng của từng nút trên màn hình:
| KHÔNG | Tên | Chức năng |
|---|---|---|
| (1) | Tên hồ sơ hiện tại | Nhấp vào tên tệp đang sử dụng để vào trang quản lý tệp, và bạn có thể tải lên, tải xuống, đọc, lưu, ghi đè, so sánh và xóa tệp. |
| (2) | Màn hình báo thức | Nếu thiết bị báo động hiện đang ở trạng thái báo động, biểu tượng sẽ có màu đỏ, hãy nhấp vào để xem chi tiết báo động. |
| (3) | Cấp độ người dùng | Cấp độ người dùng hiện tại được hiển thị, nhấp chuột để chuyển đổi giữa các người dùng 1/2/3/4 (Người vận hành/Kỹ thuật viên/Quản lý/Cấp cao nhất) và thay đổi mật khẩu của mỗi người dùng. |
| (4) | Thời gian hệ thống | Hiển thị ngày giờ hiện tại. Nhấp chuột để chỉnh sửa cài đặt. |
| (5) | Hiển thị tốc độ | Hiển thị tốc độ hiện tại (thủ công/tự động). Nhấp chuột để điều chỉnh tốc độ. |
| (6) | Hiển thị ngôn ngữ | Hệ thống hiện tại hiển thị biểu tượng ngôn ngữ. Nhấp vào biểu tượng này để chuyển đổi ngôn ngữ hiển thị trên màn hình. |
| (7) | Nút ruy băng | Đối với các mục chức năng khác, hãy nhấp chuột để chọn Xem để chỉnh sửa. |
| (8) | Hiển thị chế độ hoạt động | Bạn có thể chuyển đổi chế độ hoạt động hiện tại (Nguyên bản/thủ công/tự động) thông qua núm xoay ở góc trên bên trái của bộ điều khiển cầm tay. |
| (9) | Thao tác trục | Vào trang thao tác trục mặc định của hệ thống và bạn có thể chuyển sang trang hiển thị trục (13) thao tác IO (14). |
| (10) | Thao tác I/O | Nhấp chuột để vào giao diện thao tác I/O, giao diện này có thể hiển thị trạng thái BẬT/TẮT đầu vào theo thời gian thực và trạng thái BẬT/TẮT của từng điểm đầu ra. (Lưu ý: Đoạn văn cuối cùng không liên quan đến đoạn văn và cần được dịch riêng.) |
| (11) | Biểu diễn trục | Trên giao diện hiển thị trục, khi bạn sử dụng nút bên phải để điều khiển trục, bạn có thể quan sát trạng thái thời gian thực của điểm gốc, giới hạn, phanh, vị trí hiện tại, mô-men xoắn trục và tốc độ. |
| (12) | Các nút thao tác trục | Hoán đổi với trục chính và trục phụ của (8) và (9) và nhấp để di chuyển từng trục. |
| (13) | Chuyển đổi góc nhìn | Khi trục được vận hành thông qua (15), góc nhìn được chuyển đổi và thuận tiện để so sánh với máy thực tế. |
| (14) | Chuyển đổi tốc độ | Nhấp chuột để chuyển đổi tốc độ chạy thủ công, được chia thành năm cấp độ: 0.1/1.0/thấp/trung bình/cao. Lưu ý rằng bạn không thể sử dụng thang đo 0.1/1.0 để di chuyển trục mà không quay lại điểm ban đầu. |
| (15) | Miễn phí, vận hành thủ công | Chế độ vận hành tự do: Có thể điều khiển chuyển động của từng trục riêng lẻ bằng cách nhấn các nút. Chế độ vận hành thủ công: điều khiển từng trục để di chuyển đến một điểm cố định bằng cách nhấn một nút. |
(2) Hoạt động I/O
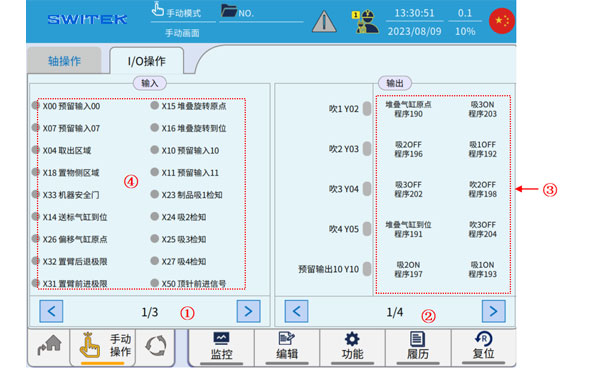
Danh sách các chức năng chú thích được hiển thị trên màn hình:
| KHÔNG. | Tên | Chức năng |
|---|---|---|
| (1) | Chuyển trang | Chuyển đổi trang hiển thị thông tin đầu vào. |
| (2) | Chuyển trang | Chuyển đổi trang của nút Output. |
| (3) | Nút đầu ra | Nhấn và giữ công tắc an toàn ở phía sau bộ điều khiển cầm tay, sau đó nhấp vào từng nút để bật/tắt đầu ra. |
| (4) | Hiển thị đầu vào | Hiển thị trạng thái BẬT/TẮT của tín hiệu đầu vào. |


Liên hệ SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right






