
sales06@switek.biz

+86 186 5927 5869

Shopping

Subscrib to Us
sales06@switek.biz
+86 186 5927 5869
Shopping
Subscrib to Us
Keywords:Panasonic A6 Servo Installation Instruction, Panasonic A6 Driver, Panasonic A6 Series Servo Motor Manual
In this full-closed control, you can make a position control by using a external scale mounted externally which detects the position directly and feeds it back. With this control, you can control without being affected by the positional variation due to the ball screw error or temperature and you can expect to achieve a very high precision positioning in sub-micron order.
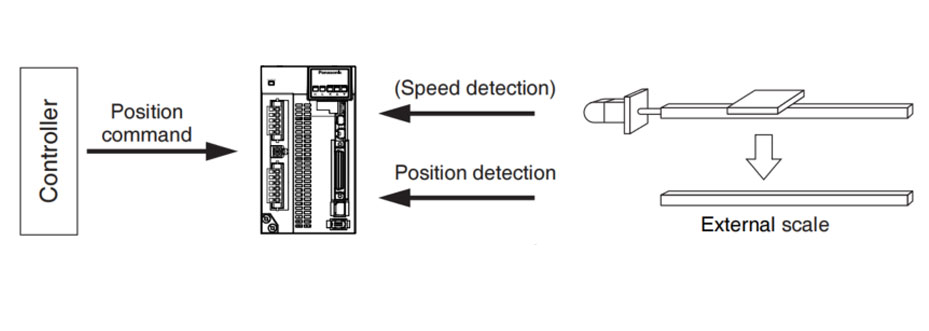
We recommend the external scale division ratio of 1/40 ≤ External scale division ration ≤ 1280
•P.3-19 "Control Block Diagram" • P.3-22 "Wiring Diagram to the connector, X4" • P.3-35 "Inputs and outputs on connector X4" • P.4-6 to P.4-85 "Details of parameter"
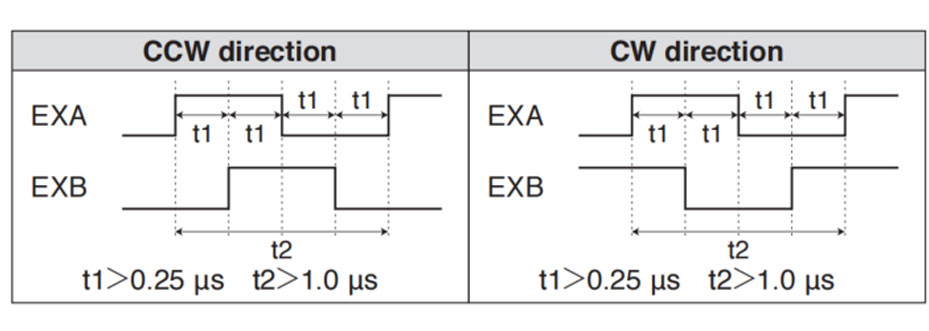
Select the type of external scale to be used.
• Relevant parameters
| Parameter No. | Title | Range | Function |
|---|---|---|---|
| Pr3.18 | External scale selection | 0 to 6 | Select the type of external scale. |
| Pr3.26 | Reversal of direction of external scale | 0 to 3 | Reverse the direction of external scale, feedback counter. |
Set up the division ratio of encoder resolution and external scale resolution.
• Relevant parameters
| Parameter No. | Title | Range | Function |
|---|---|---|---|
| Pr3.24 | Numberator of external scalel division | 0 to 223 | Set up the numerator of the external scale dividing setup. |
| Pr3.25 | Denominator of external scale division | 0 to 223 | Set up the Denominator of the external scale dividing setup. |
For details of these parameters, refer to P.4-6 to P.4-85 "Details of parameter".
This function detects the positional difference between the motor (encoder) and load (external scale) and enables the hybrid excessive deviation protection if the differene exceeds Pr3.28 "Hybrid excessive deviation setup".
Hybrid excessive deviation is mainly caused by feedback scale error, wrong connection and loose connection between the motor and load.
• Relevant parameters
| Parameter No. | Title | Range | Function |
|---|---|---|---|
| Pr3.28 | Hybrid deviation excess setup | 1 to 227 | You can setup the permissible gap (hybrid deviation) between the present motor position and the present external scale position. |
| Pr3.29 | Hybrid deviation clear setup | 0 to 100 | As the motor turns the number of revolutions set by this parameter, the hybrid deviation is cleared to 0. |
For details of these parameters, refer to P.4-6 to P.4-85 "Details of parameter".


Contact SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right






