
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
الكلمات المفتاحيةروبوت IML؛ تشغيل روبوت IML؛ روبوتات وضع العلامات داخل القالب
تتضمن إعدادات المعلمات الميكانيكية لروبوت IML اختيار وحدة الوظائف المعيارية، والمعلمات الميكانيكية للمحور، ومحرك المؤازرة، وما إلى ذلك، لضمان عمل روبوت IML بأمان وكفاءة.
اختيار النموذج

| لا. | اسم | وظيفة |
|---|---|---|
| (1) | اختيار الطراز | انقر هنا لاختيار اسم الوضع المناسب. |
| (2) | يحفظ | بعد اختيار (1) النموذج، انقر فوق "حفظ" لتأكيد العملية. |
| (3) | يتم عرض معلومات الطراز المحدد | يُعرض هذا القسم من المعلومات للنماذج لمساعدتك على التمييز بينها. (يجب الحفاظ على هذا الجزء من المعلومات في النموذج أثناء الإنتاج لضمان دقته). |
يرجى ملاحظة أن عملية اختيار النموذج وحفظه المذكورة أعلاه لا تُفعّل فورًا بعد اكتمال محتوى النموذج، يجب تهيئة معلمات الميكانيكا ومعلمات المؤازرة وحفظها، ثم إعادة تشغيل النظام لتفعيلها.
المعايير الميكانيكية

| لا. | اسم | وظيفة |
|---|---|---|
| (1) | تهيئة | سيؤدي النقر عليه إلى قراءة البيانات الأولية للمعلمات الميكانيكية في ملف النموذج وإعادتها إلى الشاشة في (4). |
| (2) | يحفظ | حفظ التغييرات الحالية |
| (3) | صفحة | يتم تمرير المعلمات لأعلى ولأسفل. |
| (4) | محتوى المعلمات الميكانيكية |
|
يرجى ملاحظة أن تعديل المعلمات المذكورة أعلاه لا يسري مفعوله فوراً، بل يجب حفظه، ولن يسري مفعوله إلا بعد إعادة تشغيل النظام.
معلمات القيادة

| لا. | اسم | وظيفة |
|---|---|---|
| (1) | تهيئة | سيؤدي النقر عليه إلى قراءة البيانات الأولية لمعلمات محرك الأقراص في ملف النموذج وإعادة إرسالها إلى الشاشة في (4). |
| (2) | يحفظ | احفظ التغييرات الحالية. |
| (3) | صفحة | يتم تمرير المعلمات لأعلى ولأسفل. |
| (4) | محتوى معلمات محرك الأقراص | يتم تعديل كل معلمة من معلمات السائق وعرضها. |
تعليمات لضبط بعض معايير محرك الأقراص:
| لا. | اسم | تأثير | القيمة الأولية | يتراوح | وحدة | النقطة الرئيسية للإعداد | |
|---|---|---|---|---|---|---|---|
| PA1-02 | اختيار نظام INC/ABS | إعادة التشغيل | 0 | 0~1 | "0" هو محرك تزايدي، و"1" هو محرك مطلق | ||
| PA1-04 | اتجاه الدوران | إعادة التشغيل | 0 | 0~1 | اضبطه عندما يدور المحرك في الاتجاه الخاطئ | ||
| PA1-13 | وضع الضبط | في الوقت الحالى | 0 | 0~2 | 0 تعني الوضع التلقائي، 1 تعني الوضع شبه التلقائي، 2 تعني الوضع اليدوي. يتم ضبط الروبوت على الوضع 1 عند شحنه. | ||
| PA1-14 | نسبة الحمل إلى عزم الدوران | في الوقت الحالى | 23.0 | 0.0~300 | تايمز | ||
| PA1-15 | كسب الضبط | في الوقت الحالى | 7 | 1~40 | |||
| PA1-27 | قيمة حد عزم الدوران الأمامي | في الوقت الحالى | 300 | 0~500 | |||
| PA1-28 | قيمة حد عزم الدوران السالب | في الوقت الحالى | 300 | 0~500 | |||
| PA1-52 | إعداد S acc/dcc | في الوقت الحالى | 0.0 | 0.0~1000.0 | |||
| PA1-54 | عدد ثابت من إجابات أوامر تحديد المواقع | في الوقت الحالى | 30.0 | 0.00~250.00 | |||
| PA1-55 | كسب حلقة الموضع 1 | في الوقت الحالى | 17 | 1~2000 | |||
| PA1-56 | زيادة سرعة الحلقة 1 | في الوقت الحالى | 5 | 1~2000 | |||
| PA1-58 | كسب التغذية الراجعة 1 | في الوقت الحالى | 0.000 | 0.000~1.500 | |||
| PA1-59 | ترشيح عزم الدوران | إعادة التشغيل | 0.00 | 0.00~20.00 | |||
| PA1-70 | وضع مرشح الشق | في الوقت الحالى | 1 | 0~1 | عندما تكون القيمة 0، يكون الكشف التلقائي 1 صالحًا للقيمة المحددة | ||
| PA1-71 | رقم التردد للشق 1 | في الوقت الحالى | 134 | 10~4000 | |||
| PA1-72 | تخفيف المستوى 1 | في الوقت الحالى | 1 | 0~40 | |||
| PA1-73 | عرض الشق 1 | في الوقت الحالى | 2 | 0~3 | |||
| PA1-74 | رقم تردد الشق 2 | في الوقت الحالى | 53 | 10~4000 | |||
| PA1-75 | تخفيف الشق 2 | في الوقت الحالى | 1 | 0~40 | |||
| PA1-76 | عرض الشق 2 | في الوقت الحالى | 2 | 0~3 | |||
| PA1-78 | التردد رقم 0 لمقاومة الرنين أثناء الكبح | في الوقت الحالى | 7.0 | 1~300.0 | Hz | يكون كبح الاهتزاز فعالاً عند التوقف، ومن الضروري قياس الاهتزاز الفعلي قبل الضبط. | |
| PA1-79 | نسبة قصور اهتزاز الفرامل | في الوقت الحالى | 0 | 0~80 | إذا تم ضبطه على 0، فسيكون PA1-78 غير صالح، وعندما يتم ضبطه على 1، فسيكون PA1-78 صالحًا. | ||
| PA1-80 | التردد رقم 1 لمقاومة الرنين أثناء الكبح | في الوقت الحالى | 8.0 | 1~300.0 | Hz | يكون كبح الاهتزاز فعالاً عند التوقف، ومن الضروري قياس الاهتزاز الفعلي قبل الضبط. | |
| PA1-81 | نسبة قصور اهتزاز الفرامل | في الوقت الحالى | 0 | 0~80 | إذا تم ضبطه على 0، فإن PA1-80 غير صالح، وعندما يتم ضبطه على 1، فإن PA1-80 صالح. | ||
| PA1-94 | وضع مرشح عزم الدوران | إعادة التشغيل | 0 | 0~1 | اضبطه على 0 ولا تستخدم ترشيح عزم الدوران | ||
| PA2-64 | حان وقت عمل براك | في الوقت الحالى | 0 | 0.00~99.9 | Sec | ||
| PA2-65 | اختيار مقاومة الارتداد | إعادة التشغيل | 1 | 0~1 | اضبط القيمة على 1 عند توصيل مقاومة التجديد، وعلى 0 عند عدم توصيلها. | ||
| PA2-69 | الانحراف عن القيمة المكتشفة | في الوقت الحالى | 15.0 | 0.1~100.1 | Rev | ||
| PA3-79 | ضبط قيمة المعاوقة الرجعية | في الوقت الحالى | 30.0 | 3.9~160.0 | Ω | يتم تحديد قيمة المقاومة التجديدية | |
| PA3-80 | إعداد طاقة مقاومة إعادة التشغيل | في الوقت الحالى | 40 | 1~5000 | W | ضبط سعة المقاومة بأثر رجعي | |
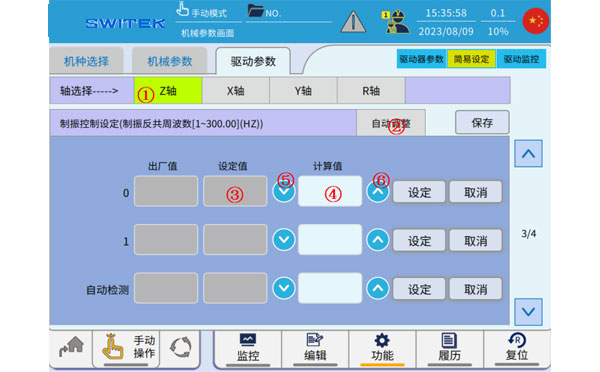
وضع الضبط والإعداد السهل

| لا. | اسم | وظيفة |
|---|---|---|
| (1) | اختيار المحور | انقر لتحديد المحور الذي تريد العمل عليه. |
| (2) | الضبط التلقائي | عند ضبط الآلة قبل مغادرتها المصنع، يمكن استنتاج معلمات القيادة في هذا الوضع. |
| الضبط شبه التلقائي | وضع الضبط شبه التلقائي، حيث يتم تثبيت بعض المعلمات، وسيتم ضبط بعض المعلمات بدقة. | |
| الضبط اليدوي | جميع معايير القيادة ثابتة. | |
| (3) | تحديد القيمة | نسبة الكسب المضبوط إلى القصور الذاتي إلى عزم الدوران المستخدمة حاليًا. |
| (4) | القيمة المحسوبة | القيمة المستمدة من الحساب الحالي. |
| (5) |  | قم بتطبيق محتوى القيمة المحسوبة على القيمة المحددة. |
| (6) |  | قم بتطبيق محتويات "القيمة المحددة" على "القيمة المحسوبة". |
| (7) | يحفظ | قم بتعديل وحفظ معلمات برنامج التشغيل الحالية. |
عند التشغيل التلقائي، يمكنك تبديل وضع الضبط لكل محور على هذه الواجهة، وتعديل نسبة عزم القصور الذاتي وكسب الضبط، وذلك لمراقبة تأثير تشغيل القيم المحددة في الوقت الفعلي وإيجاد إعدادات معلمات أكثر ملاءمة.
عند ضبطه على وضع الضبط التلقائي، يتم قياس نسبة عزم القصور الذاتي PA1-14 في الوقت الحقيقي.
تتمثل الوظيفة الرئيسية لوضع الضبط التلقائي في تعديل القيمة تلقائيًا وفقًا لتأثير التشغيل عندما تكون معلمات القيادة المناسبة غير معروفة في المرحلة الأولية من عملية الضبط، حتى يصبح تأثير التشغيل جيدًا ومستقرًا، و تميل قيمة نسبة عزم القصور الذاتي إلى الثبات.
عندما يستقر أداء التشغيل، انتقل إلى وضع الضبط شبه التلقائي، واضبط المعلمات يدويًا، واحفظها، ثم أوقف تشغيل الطاقة. وأعد تشغيلها مرة أخرى لتفعيل المعلمات. في وضع الضبط شبه التلقائي، تُثبّت المعلمات الرئيسية مثل "نسبة عزم القصور الذاتي"، بينما تُعدّل بعض معلمات المؤازرة تلقائيًا لضمان التشغيل السلس.
عند ضبط الوضع على "وضع الضبط اليدوي"، يتم تثبيت جميع معلمات المؤازرة. يتطلب هذا الوضع دقة عالية في ضبط المعلمات.
إعداد سهل - ضبط فلتر الشق

| لا. | اسم | وظيفة |
|---|---|---|
| (1) | اختيار المحور | انقر لتحديد المحور الذي تريد العمل عليه. |
| (2) | الترشيح التكيفي | تشغيل/إيقاف وظيفة التصفية التكيفية. |
| (3) | المعلمات المتعلقة بتصفية النطاق | معايير مختلفة متعلقة بوظيفة ترشيح النطاق. |
إذا صدر صوت حاد من المحرك المؤازر أثناء التشغيل، يمكن تفعيل المرشح التكيفي، الذي سيزيل تلقائيًا الصوت غير الطبيعي الناتج عن الرنين الميكانيكي، ويمكنه إزالة نقطتي رنين. عند ضبط تردد الرنين على 4000، لا توجد نقطة رنين.
إعداد سهل - ضبط التحكم في الاهتزاز
| لا. | اسم | وظيفة |
|---|---|---|
| (1) | اختيار المحور | حدد المحور الذي تريد تشغيله. |
| (2) | الضبط التلقائي | يتم الكشف التلقائي عن المعايير ذات الصلة بضبط التحكم في الاهتزاز. |
| (3) | تحديد القيمة | معايير التحكم في الاهتزاز المستخدمة حاليًا. |
| (4) | القيمة المحسوبة | احسب القيمة العددية المشتقة. |
| (5) | | قم بتطبيق محتوى القيمة المحسوبة على القيمة المحددة. |
| (6) | | قم بتطبيق محتويات "القيمة المحددة" على "القيمة المحسوبة". |
ضبط التحكم في الاهتزاز: يُعدّ هذا الضبط فعالاً في كبح الاهتزاز عند التوقف، وتتراوح قيمته الضبطية العامة بين 5 و10. يمكن حساب قيمة الضبط باختصار بناءً على شكل موجة عزم الدوران، ولكن قد يصعب ضبطها بدقة من المحاولة الأولى.
إعداد سهل - خاصية كشف التصادم

| لا. | اسم | وظيفة |
|---|---|---|
| (1) | اختيار المحور | The axis selection to set |
| (2) | أقصى تباين في عزم الدوران |


الاتصال بـSWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China






