
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
الكلمات المفتاحيةروبوت IML؛ تشغيل روبوت IML؛ روبوتات وضع العلامات داخل القالب
يُعدّ مستوى روبوت IML بالنسبة لآلة قولبة الحقن والقالب بالغ الأهمية لجودة القطع. سنشرح هنا كيفية تركيب روبوت SWITEK IML خطوة بخطوة مع ضبط مستوى الروبوت بدقة لضمان إنتاج فعال لحاويات IML عالية الجودة.
الخطوة 1: تخطيط تثبيت نظام IML
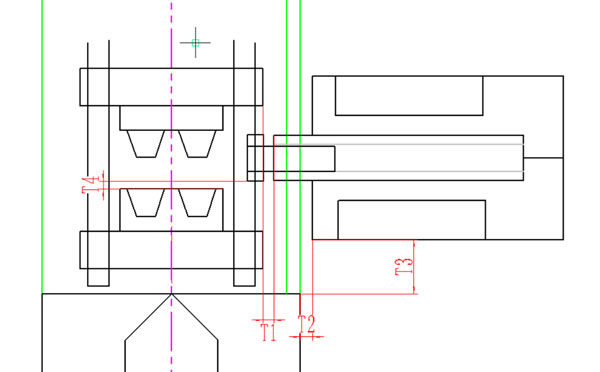
يتم تركيب روبوت IML ذي المدخل الجانبي على الجانب غير المخصص للمشغل من ماكينة قولبة الحقن. يُفتح باب الأمان في الجانب غير المخصص للمشغل من ماكينة قولبة الحقن بشكل دائم للسماح لروبوت IML بالدخول إلى ماكينة قولبة الحقن لالتقاط الأجزاء وإدخال الملصقات، دون التأثير على فتح القالب وإغلاقه. تُعدّ المعلمات T1 وT2 وT3 وT4 إرشادات عامة للمسافة بين روبوت IML وماكينة قولبة الحقن والقالب في نظام IML. يُرجى التأكد من أن T1 أكبر من 6 سم وT4 أكبر من 2 سم.
المسافة T2 هي المسافة بين روبوت IML وآلة قولبة الحقن. إذا لم نكن متأكدين من المسافة التي يمكن ضمانها بين روبوت IML وآلة قولبة الحقن، فيجب علينا التأكد من أن T1 أكبر من 6 سم لمنع أي تداخل في عملية الإنتاج.
ستحدد المسافة T3 موضع ذراع الروبوت IML أثناء العمل لمنع اصطدام المثبت بالقالب في حالة وجود انحراف طفيف. إذا لم تكن متأكدًا من قيمة T3، فتأكد من أن T4 أكبر من 2 سم بعد تركيب المثبت.
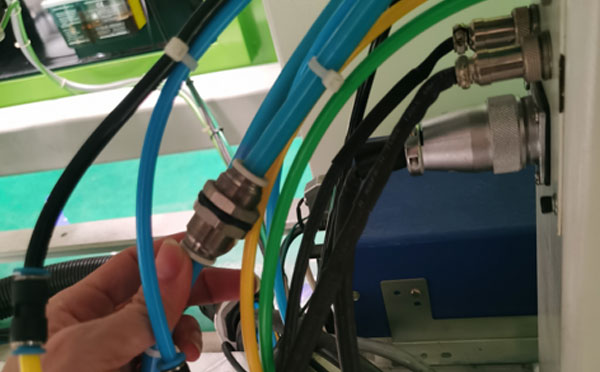
الخطوة الثانية: توصيل خط الأنابيب
قم بتوصيل مصدر الطاقة ووحدة التحكم ومصدر الهواء وقم بتشغيل روبوت IML.

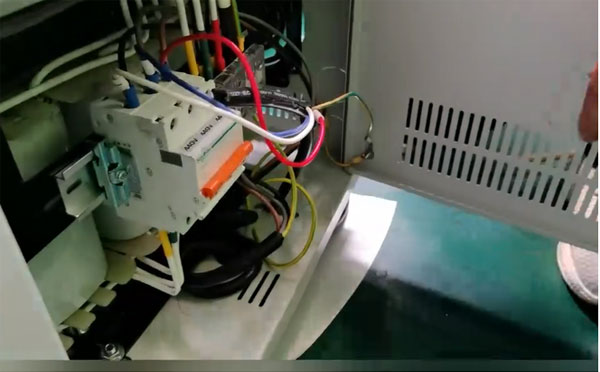
بعد التشغيل، تحقق من تثبيت روبوت IML ثم حرره، واختبر يدويًا حركة كل محور وعمل التثبيت. التثبيت.

يمكنك الانتقال إلى الخطوة التالية من بدء تشغيل روبوت IML بعد التأكد من توصيل جميع أنابيب الهواء بشكل جيد وأن حركات جميع المحاور والتجهيزات تعمل بشكل جيد.

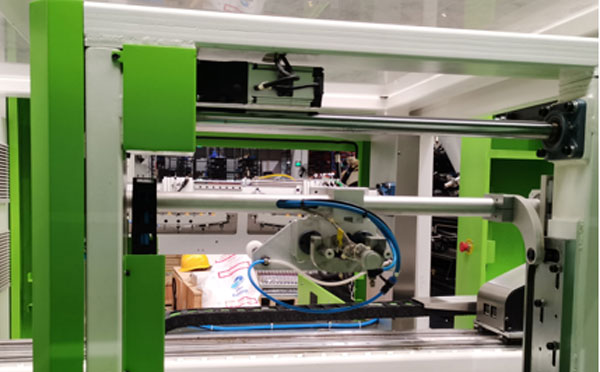
الخطوة 3: بدء تشغيل روبوت IML وضبط المستوى
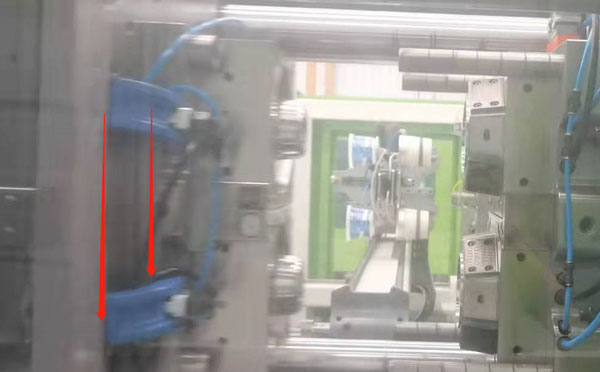
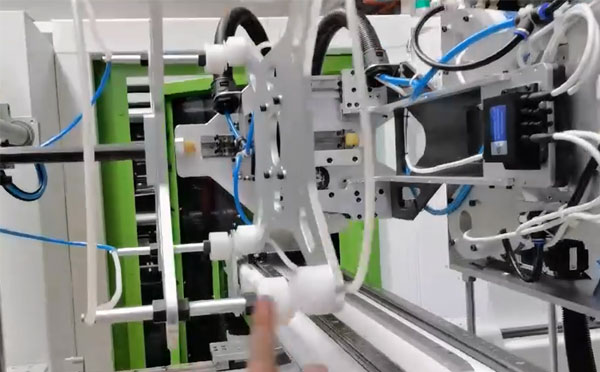
تُعدّ المسافة بين المندريل وتجويف القالب عاملاً أساسياً في قدرة الروبوت على وضع الملصق بدقة، وهو ما سيحدد جودة حاوية IML المنتجة.
في نظام IML مُثبّت بشكل مثالي، سيكون نموذج روبوت IML وتجويف القالب على نفس المحور المركزي. في هذه الحالة، نضمن عدم وجود أي مقاومة للنموذج عند دخوله وخروجه من تجاويف القالب، وسيتم وضع الملصقات دون أي تصادم وبموضع موحد.
يمكن تعديل موضع المندريل ومستواه بالنسبة لتجويف القالب بواسطة الأرجل الداعمة الأربعة لروبوت IML وأغطية آلة قولبة الحقن.
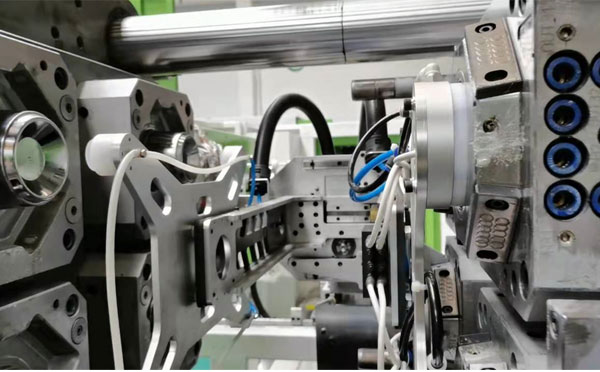
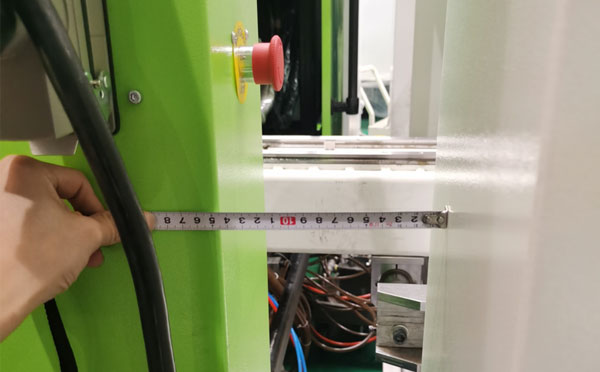
إجراء ضبط مستوى نظام IML هو كالتالي: ضبط مستوى آلة قولبة الحقن، مع اعتبار حافة اللوح المتحرك مرجعًا، والتأكد من أن كلا جانبي القالب موازيان لحافة اللوح الثابت.
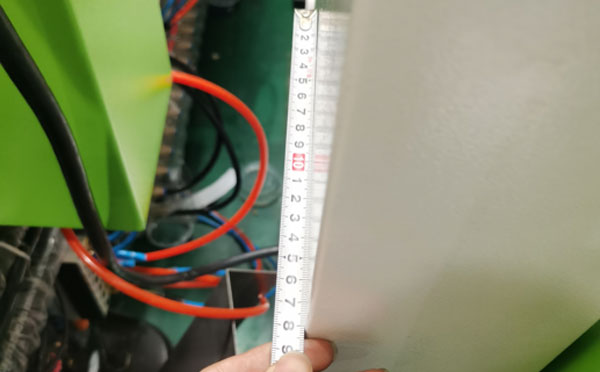
اضبط الوضع الرأسي لروبوت IML بالنسبة لماكينة قولبة الحقن. يمكننا استخدام رافعة أو رافعة شوكية لتحريك طرف روبوت IML لضبط الفجوة بين النموذج الأولي وتجويف القالب، والتأكد من أن الانحراف على كلا الجانبين أقل من 1 مم.
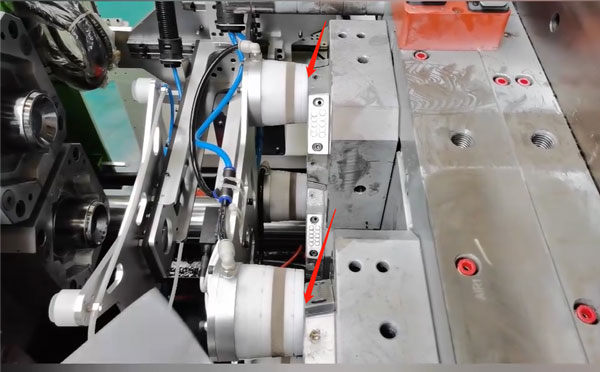
من خلال رفع أو خفض العمود على جانب واحد من روبوت IML، يمكن تصحيح الانحراف العلوي والسفلي للمغزل.


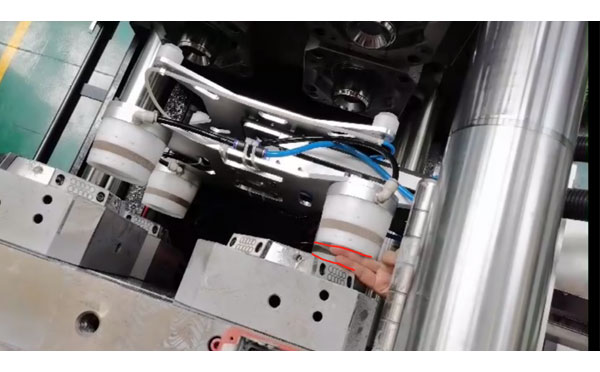
عند فصل المحرك المؤازر، إذا أمكن دفع المندريلات إلى تجاويف القالب يدويًا، فهذا يعني أن مستوى روبوت IML مضبوط بشكل جيد.

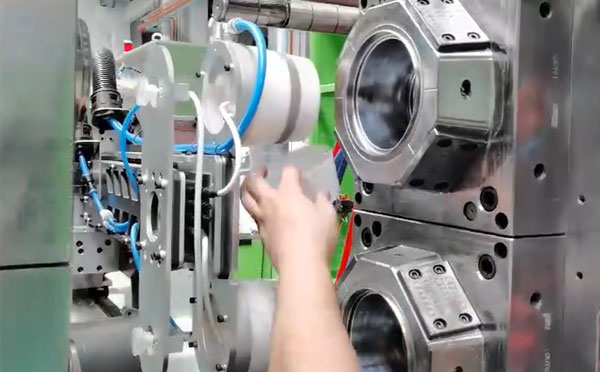
قم بحقن عينة واحدة باستخدام نفس القالب، واقطع الجزء العلوي والسفلي منها، ثم أدخل الحلقة في تجويف القالب. ادفع المندريل داخل الحلقة، ثم ثبت المندريل في مكانه.
الخطوة الرابعة: استبدال المخزن وضبط المستوى.
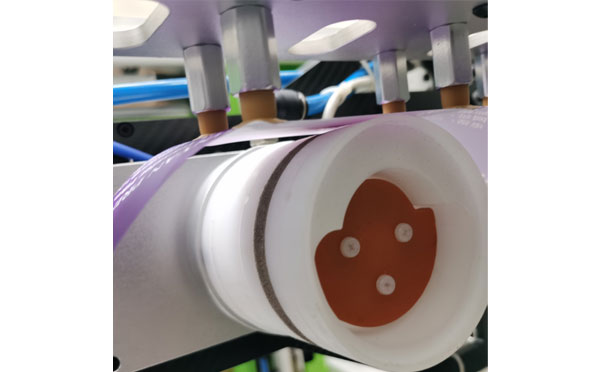

عند تشغيل روبوت IML، يمكننا جعل أسطوانة التقاط الملصقات تلتقط ملصقًا واحدًا من المخزن وتلفه حول المندريل. مع ترك مسافة 1-2 مم بين حافة الملصق وأسفل المندريل لضمان وضع الملصقات بشكل مثالي في تجاويف القالب.
اضبط موضع كوب الشفط لضمان إمكانية شفط المنتجات.
بعد ضبط جميع المستويات، أصبح روبوت IML جاهزًا للبرمجة لإنتاج حاويات IML. يُرجى اتباع تعليمات التدريب الخاصة بروبوت IML لتعديل موضع التقاط الملصق ووضعه. إذا كانت لديكم أي استفسارات أخرى بخصوص تركيب وضبط روبوت SWITEK IML، فلا تترددوا في التواصل مع مهندسينا، حيث يتوفر دعمنا الفني عبر الإنترنت دائمًا. لخدمتكم.


الاتصال بـSWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China






