
sales06@switek.biz

+86 186 5927 5869

Bize Abone Olun
sales06@switek.biz
+86 186 5927 5869
Bize Abone Olun
Anahtar Kelimeler:IML Robot; IML Robot İşletimi; Kalıp İçi Etiketleme Robotları
"Öğretim" bölümü, IML robotunun programını inceleyip düzenleyebileceğiniz yerdir. Modüler tasarımlı bir kontrol sistemi olarak, mod seçiminden sonra, parametre ayarları, zamanlayıcı ayarları ve sayaç ayarlarını yaptıktan sonra, IML projeniz için başlangıç programı elde edeceksiniz. "Öğretim" sayfasında, IML robotunun daha verimli çalışması için programda bazı küçük ayarlamalar yapabilirsiniz.
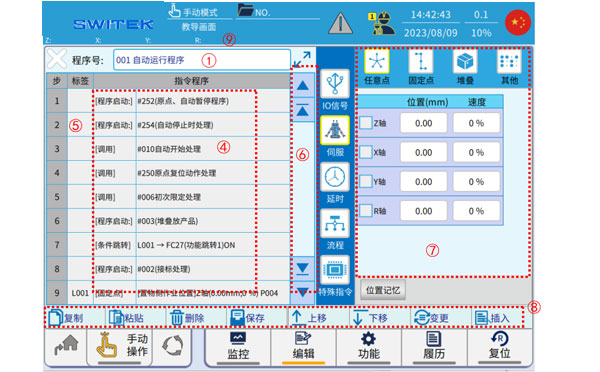
Her işaretleme alanının açıklaması:
| HAYIR. | İsim | İşlev |
|---|---|---|
| (1) | Program Seçimi/Görüntüleme | Açılan "Program Listesi" penceresine tıklayın, eklemek, düzenlemek veya görüntülemek istediğiniz program numarasını seçin ve düzenleme arayüzüne girmek için tıklayın. |
| (2) | Program uzantısı ekranı |  simgesine tıklayın ve komut içeriğinin tamamını kolayca gözlemlemek için program ekranının genişletilmiş arayüzüne girin. simgesine tıklayın ve komut içeriğinin tamamını kolayca gözlemlemek için program ekranının genişletilmiş arayüzüne girin. |
| (3) | Geri dönmek | Eğitim düzenleme arayüzünden çıkmak için tıklayın; programda değişiklik yapıldıysa derleme işlemi başlayacaktır. |
| (4) | Öğretim içeriği | Komutun içeriği görüntülenir. |
| (5) | Etiket Sütunu | Sekmenin düzenleme alanına gidin. Komut satırından önce bir etiket eklemek için tıklayın (yeni bir etiket oluştururken, sayı girmeden "EN" seçeneğine tıklayabilirsiniz ve kullanılmamış bir etiket numarası otomatik olarak eklenecektir). |
| (6) | Birinci düzey talimatlar listesi |
|
| (7) | Komut ikincil listesi ve parametre ayarları | Alt liste komutlarının düzenlenmesi ve parametre ayarlarının yapılması. |
| (8) | Komut düzenleme kısayolları |
|
| (9) | Eksen konum gösterimi | Her eksenin mevcut konumu kolay gözlem için görüntülenir. |
Aşağıda IML Robot Programını "Öğretme" yöntemine ilişkin ayrıntılar yer almaktadır:
Program listesine girmek için program adının görüntülendiği alana tıklayın.
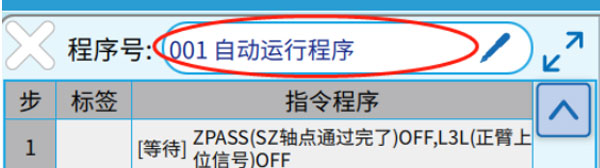
Arayüz aşağıdaki gibidir:
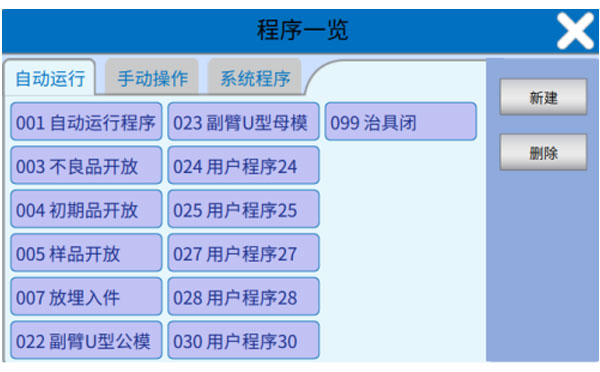
Otomatik Çalıştırma (001-099): 001, kullanıcı tarafından düzenlenebilen ana programdır; 024-083 ise kullanıcı tarafından oluşturulan ve düzenlenen alt programlardır.
Manuel çalıştırma (#178-#249):
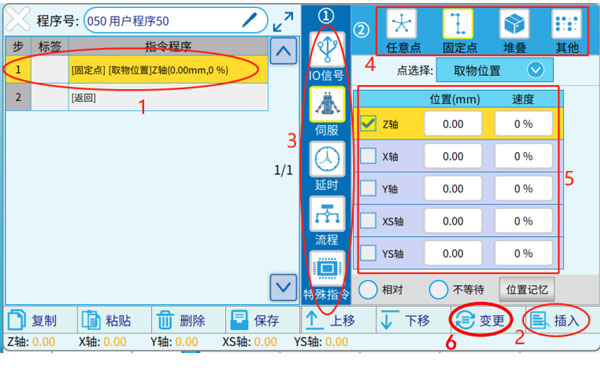
Düzenleme arayüzü yukarıdaki şekilde gösterildiği gibidir ve yeni komut satırı aşağıdaki 6 adıma ayrılmıştır:
Aşağıda en sık kullanılan komutlardan bazıları yer almaktadır:
Uygulama programlama öğretilirken, kullanıcıların enjeksiyon kalıplama makinesi ve manipülatörünün (burada IML Robot) standart IO kontrolü için temel X ve Y noktası mantığını düzenlemeleri önerilmez ve programın doğruluğunu sağlamak için sistemin fonksiyon alt programını çağırmaları gerekir. Bu alt programlar "IO Sinyalleri" sınıfında yer almaktadır.
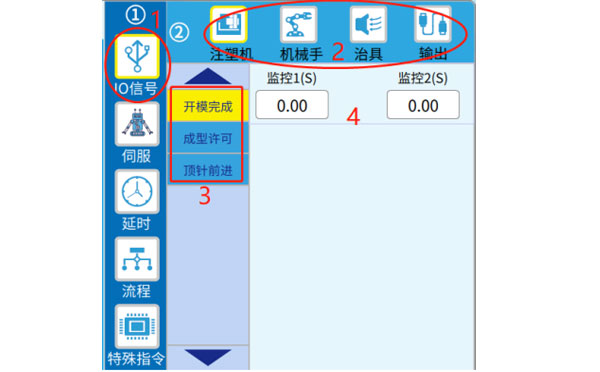
Yukarıdaki şekilde gösterildiği gibi, programlama adımları 1 (Ana kategori), 2 (Alt kategori), 3 (Özel talimatlar) ve 4 (Özel parametreler) uyarınca adım adım ayarlanır ve tamamlandıktan sonra "Değiştir" veya "Ekle" düğmesine tıklanır.
IML robotuna ait kolaylık fonksiyonlarını düzenlerken, aşağıdaki şekildeki düğmeleri kullanarak IML robotuna ait aparatları çalıştırabilirsiniz (Sağdaki noktayı açıp kapatarak algılama sinyalinin AÇIK/KAPALI durumunu gözlemleyebilirsiniz)  Bu sayede gerçek dünya çalışma senaryolarında simülasyonlar programlamak kolaylaşır.
Bu sayede gerçek dünya çalışma senaryolarında simülasyonlar programlamak kolaylaşır.

Giriş/çıkış noktasının çıkış mantığını düzenlemek için, düzenleme arayüzü aşağıdaki gibidir:
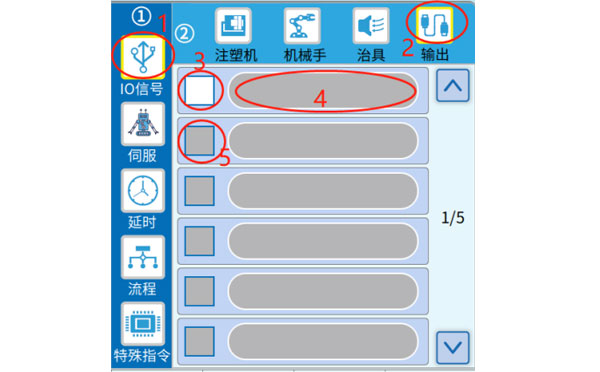
Yukarıdaki şeklin düzenleme arayüzünde, 3 numaralı etikete tıklayın, 4 numaralı işaret düzenlenebilir hale gelir, Çıktı alınacak Y noktasını AÇIK veya KAPALI olarak seçin ve onaylayın. Aynı anda IML robot Y noktalarını da çıktı almak istiyorsanız, 5 numaralı işaretleyiciye tıklayın, ikinci Y noktasının çıktısını düzenlemeye başlayın. İşiniz bittiğinde "Değiştir" veya "Ekle"ye tıklayın.
Servo ekseninin hareket komutlarını düzenleyin; sabit bir noktaya (nokta tanımlanır, "Konum Ayarları"nda değiştirilebilir ve referans alınabilir), herhangi bir noktaya, yığılmış noktaya (konum menüdeki "Yığın"da ayarlanır) hareket etme, ve ekseni orijine geri döndürme komutu vb.
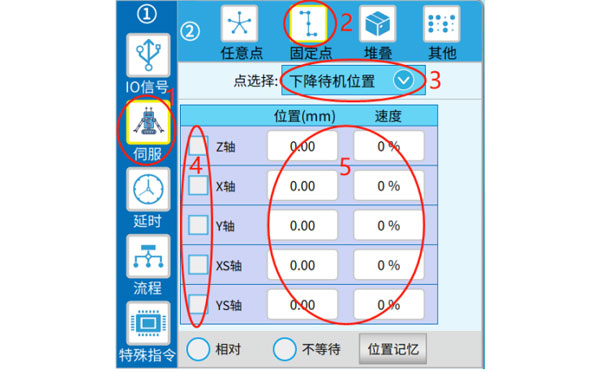
Yukarıdaki şekilde gösterildiği gibi, 3 numaralı etiketteki belirli noktayı seçin, ardından 4 numaralı etiketteki ekseni seçin ve 5 numaralı etiketteki noktayı ve hızı ayarlayın. İşlem tamamlandığında "Değiştir" veya "Ekle" düğmesine tıklayın.
Düzenleme gecikme komutlarının iki türü vardır: zamanı belirtme ve zamanlayıcıyı belirtme (zamanlayıcı süresi değiştirilebilir otomatik olarak çalıştığında).
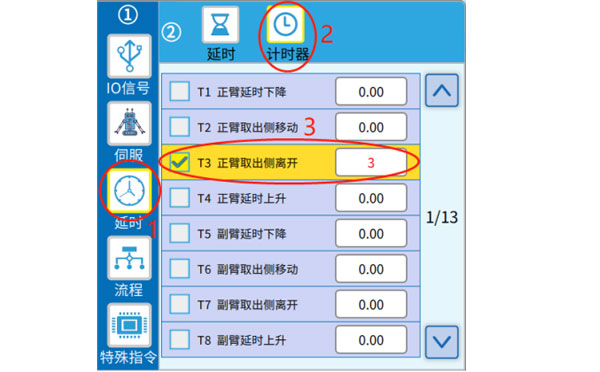
Not: Programlama öğretirken zamanlayıcı kullanmak istiyorsanız, özel olarak tanımlanmamış kullanıcı zamanlayıcıları olan T85-T100'ü tercih edin.
Çağrı ve program başlatma, alt programları kullanmanın iki yoludur. Aralarındaki fark şudur: Bir alt program çağrıldığında, alt programdaki komutun yürütülmesinin bitmesini ("return" komutuna) bekler ve çağrı tamamlanmış sayılır ve ana programda bir sonraki komut yürütülebilir. Öte yandan, başlatma alt programının yürütülmesini beklemenize gerek yoktur ve doğrudan ana programın bir sonraki adımını başlatabilirsiniz (ana program ve alt program paralel olarak yürütülür).
Program başlatma komutunu düzenleme adımları aşağıdaki gibidir:
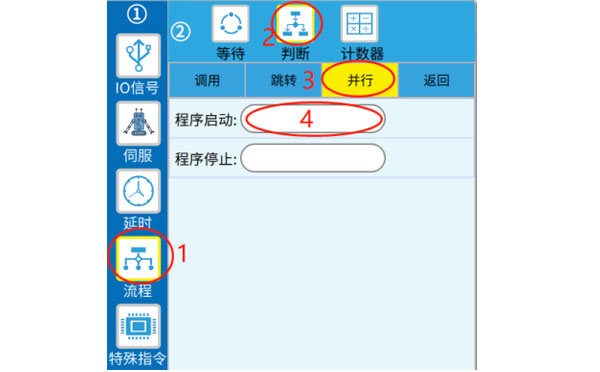
Not: Program, yukarıdaki "Programı durdur" komutuyla kapatılabilecek açık alt programı başlatır (normal şartlar altında, alt program yürütme tamamlandıktan ve "return" komutuna ulaşıldıktan sonra otomatik olarak kapatılır). Çağrı komutunu düzenleme adımları aşağıdaki gibidir:
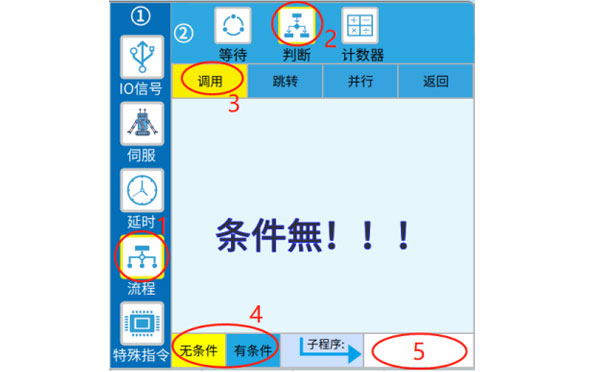
Yukarıdaki 4 numaralı simgede gösterildiği gibi, çağrı talimatını düzenlerken, koşul belirleyip belirlemeyeceğinizi seçebilirsiniz. "Koşulsuz" seçeneğini seçerseniz, çağrıyı tamamlamak için 5 numaralı işarete çağrılacak alt program numarasını girin. "Koşullu" seçeneğini seçerseniz, önce koşul ayarını tamamlamanız, ardından 6 numaralı etikete program numarasını girmeniz ve "Değiştir" veya "Ekle" düğmesine tıklamanız gerekir.
Önceki koşullu değerlendirme doğru olmadığında, sonraki çağrı yürütülmeyecek, ancak bir sonraki talimat satırı başlatılacaktır.
Atlama komutu: Program atlama komutuna kadar yürütülür ve bir sonraki adımda, ilgili etikete sahip komut satırı yürütülür; bu, bir sonraki sırada yürütülmesinin aksine yapılır.
Atlama/koşullu atlama komutlarının düzenleme adımları şu şekildedir:

4 numaralı etikette koşullar belirlemek isteyip istemediğinizi seçin, 5 numaralı etikette koşullar belirleyin (birden fazla koşul belirleyebilirsiniz), 6 numaralı etikette etiket numaralarını belirleyin ve komutları oluşturmak için "Değiştir" veya "Ekle"yi seçin. Ardından, hedef komut satırından önce, 7 numaralı etikette gösterilen etiket sütununu doldurun.
"Koşullu" atlama kullanılırsa, önceki koşul değerlendirmesi geçerli olmaz ve sonraki atlama yürütülmez; ve bir sonraki talimat satırı doğrudan başlatılır. Koşul doğruysa, etikete atlayan komut satırı çalıştırılır.
Dahili bayrağın çıktısı AÇIK/KAPALI'dır ve düzenleme prosedürü aşağıdaki simge numarasında gösterilmiştir.
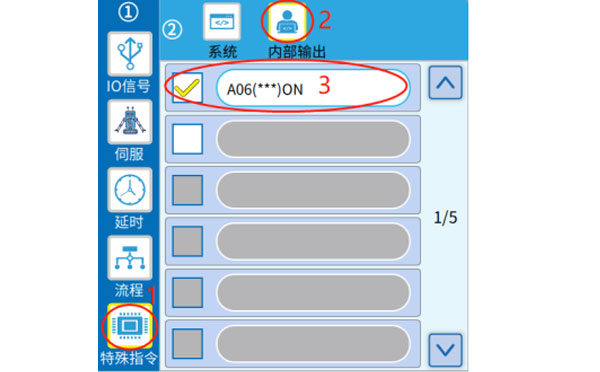
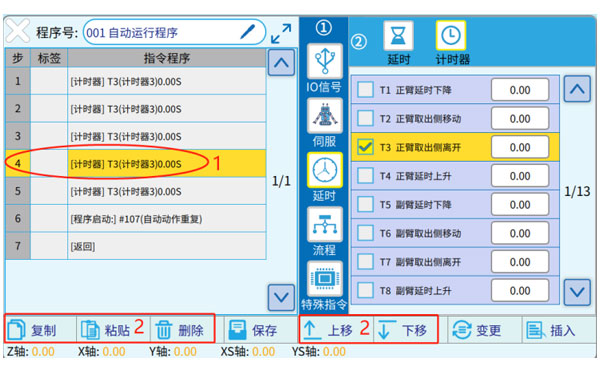
Yukarıdaki 1 numaralı simgede gösterildiği gibi, düzenlemek istediğiniz komut satırını seçin (sarıya dönün) ve ardından 2 numaralı etiketteki düğmeyi kullanarak işlemi gerçekleştirin. Her düğmenin işlevleri aşağıdaki gibidir:
Program düzenlenirken, "Kaydet" veya " " seçeneğine tıklayabilir veya "Derleme" istemini tetiklemek için diğer ayarlar sayfalarına geçebilir, "Evet"e tıklayabilir ve düzenlemenin tamamlanmasını bekleyebilirsiniz (derleme tamamlandıktan sonra otomatik olarak kaydedilecektir).
" seçeneğine tıklayabilir veya "Derleme" istemini tetiklemek için diğer ayarlar sayfalarına geçebilir, "Evet"e tıklayabilir ve düzenlemenin tamamlanmasını bekleyebilirsiniz (derleme tamamlandıktan sonra otomatik olarak kaydedilecektir).

Öğretim kumandasının sol üst köşesindeki düğmeyi AUTO konumuna getirerek otomatik çalışma arayüzüne girin. Öğretim bölümüne gidin, aşağıda gösterildiği gibi, ve " " simgesine tıklayın, 1 numaralı etikette gösterilen simgeye tıklayarak genişletilmiş ekranı açın. Tek adım durumuna girmek için 2 numaralı etiketteki "Tek adım" seçeneğine tıklayın, 3 numaralı etiketteki " " düğmesine bir kez basın, ve program 1 adıma düşecektir.
" düğmesine bir kez basın, ve program 1 adıma düşecektir.
Programın ilerleyişi 4 numarada görülebilir, "Program No" yürütülen programın numarasıdır ve "Adım No" ise yürütülen programın numarasıdır.



Contact SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, Çin
HuangYanZheng©Copy Right





