
sales06@switek.biz

+86 186 5927 5869

Bize Abone Olun
sales06@switek.biz
+86 186 5927 5869
Bize Abone Olun
Anahtar Kelimeler:IML Robot; IML Robot İşletimi; Kalıp İçi Etiketleme Robotları
IML robotunun mekanik parametre ayarları, fonksiyon ünitesinin modülünün seçimi, eksenin mekanik parametresi, servo motor vb. unsurları içerir ve IML robotunun güvenli ve verimli bir şekilde çalışmasını sağlar.
Model Seçimi

| HAYIR. | İsim | İşlev |
|---|---|---|
| (1) | Model seçimi | Lütfen ilgili mod adını seçmek için buraya tıklayın. |
| (2) | Kaydetmek | (1) modeli seçtikten sonra işlemi onaylamak için "Kaydet"e tıklayın. |
| (3) | Seçilen modelin bilgileri görüntülenir. | Modelleri birbirinden ayırt etmenize yardımcı olmak için modellerin bu bilgi bölümü görüntülenir. (Modeldeki bu bilgi bölümünün, doğruluğu korumak için üretim sırasında güncel tutulması gerekir.) |
Lütfen yukarıdaki işlemin, model seçimi - kaydetme işleminin, model içeriği tamamlandıktan sonra hemen geçerli olmadığını, mekanik parametrelerde ve servo parametrelerinde başlatma işleminin yapılması ve ardından sistemin yeniden başlatılması gerektiğini, ancak o zaman geçerli olacağını unutmayın.
Mekanik Parametreler

| HAYIR. | İsim | İşlev |
|---|---|---|
| (1) | Başlat | Üzerine tıklanması, model dosyasındaki mekanik parametrelerin başlangıç verilerini okuyacak ve bunları (4)'teki ekrana geri bildirecektir. |
| (2) | Kaydetmek | Mevcut değişiklikleri kaydet |
| (3) | Sayfa | Parametreler yukarı ve aşağı kaydırılıyor. |
| (4) | Mekanik Parametre içeriği |
|
Lütfen yukarıdaki parametrelerdeki değişikliklerin hemen geçerli olmayacağını, kaydedilmesi gerektiğini ve ancak sistem yeniden başlatıldıktan sonra geçerli olacağını unutmayın.
Sürücü parametreleri

| HAYIR. | İsim | İşlev |
|---|---|---|
| (1) | Başlat | Üzerine tıklamak, model dosyasındaki sürücü parametrelerinin başlangıç verilerini okuyacak ve bunları (4)'teki ekrana geri bildirecektir. |
| (2) | Kaydetmek | Yapılan değişiklikleri kaydedin. |
| (3) | Sayfa | Parametreler yukarı ve aşağı kaydırılıyor. |
| (4) | Sürücü parametre içeriği | Her sürücü parametresi düzenlenip görüntülenir. |
Bazı sürücü parametrelerinin ayarlanmasına ilişkin talimatlar:
| HAYIR. | İsim | Etki | Başlangıç Değeri | Menzil | Birim | Ortamın ana noktası | |
|---|---|---|---|---|---|---|---|
| PA1-02 | INC/ABS Sistem seçimi | Yeniden Başlat | 0 | 0~1 | "0" artımlı bir motordur, "1" ise mutlak bir motordur. | ||
| PA1-04 | Dönme yönü | Yeniden Başlat | 0 | 0~1 | Motor yanlış yöne döndüğünde ayarlama yapın. | ||
| PA1-13 | Ayarlama modu | Gerçek zamanlı | 0 | 0~2 | 0 otomatik, 1 yarı otomatik, 2 manuel anlamına gelir. Robot sevk edildiğinde 1 olarak ayarlanmıştır. | ||
| PA1-14 | Yük-tork oranı | Gerçek zamanlı | 23.0 | 0.0~300 | Kez | ||
| PA1-15 | Ayar kazancı | Gerçek zamanlı | 7 | 1~40 | |||
| PA1-27 | İleri tork limit değeri | Gerçek zamanlı | 300 | 0~500 | |||
| PA1-28 | Negatif tork limit değeri | Gerçek zamanlı | 300 | 0~500 | |||
| PA1-52 | S ivme/dcc ayarı | Gerçek zamanlı | 0.0 | 0.0~1000.0 | |||
| PA1-54 | Sabit sayıda konum komut yanıtı | Gerçek zamanlı | 30.0 | 0.00~250.00 | |||
| PA1-55 | Pozisyon Halkası Kazancı 1 | Gerçek zamanlı | 17 | 1~2000 | |||
| PA1-56 | Hız Halkası Kazancı 1 | Gerçek zamanlı | 5 | 1~2000 | |||
| PA1-58 | Geri Bildirim Kazancı 1 | Gerçek zamanlı | 0.000 | 0.000~1.500 | |||
| PA1-59 | Tork filtreleme | Yeniden Başlat | 0.00 | 0.00~20.00 | |||
| PA1-70 | Yeniden Başlat | Gerçek zamanlı | 1 | 0~1 | 0 olduğunda, ayarlanan değer için otomatik algılama 1 geçerlidir. | ||
| PA1-71 | Çentik 1 frekans numarası | Gerçek zamanlı | 134 | 10~4000 | |||
| PA1-72 | Çentik 1 zayıflaması | Gerçek zamanlı | 1 | 0~40 | |||
| PA1-73 | Çentik 1 genişliği | Gerçek zamanlı | 2 | 0~3 | |||
| PA1-74 | Çentik 2 frekans numarası | Gerçek zamanlı | 53 | 10~4000 | |||
| PA1-75 | Çentik 2 zayıflaması | Gerçek zamanlı | 1 | 0~40 | |||
| PA1-76 | Çentik 2 genişliği | Gerçek zamanlı | 2 | 0~3 | |||
| PA1-78 | Frenleme anti-rezonansının 0 numaralı frekansı | Gerçek zamanlı | 7.0 | 1~300.0 | Hz | Titreşim önleme, durdurma işlemi sırasında etkilidir ve ayarlamadan önce gerçek titreşimin ölçülmesi gereklidir. | |
| PA1-79 | Fren titreşim atalet oranı | Gerçek zamanlı | 0 | 0~80 | Değer 0 olarak ayarlanırsa PA1-78 geçersiz olur, 1 olarak ayarlanırsa PA1-78 geçerli olur. | ||
| PA1-80 | Frenleme anti-rezonansının 1 numaralı frekansı | Gerçek zamanlı | 8.0 | 1~300.0 | Hz | Titreşim önleme, durdurma işlemi sırasında etkilidir ve ayarlamadan önce gerçek titreşimin ölçülmesi gereklidir. | |
| PA1-81 | Fren titreşim atalet oranı | Gerçek zamanlı | 0 | 0~80 | Değer 0 olarak ayarlanırsa PA1-80 geçersizdir, 1 olarak ayarlanırsa PA1-80 geçerlidir. | ||
| PA1-94 | Tork filtre modu | Yeniden Başlat | 0 | 0~1 | Değeri 0 olarak ayarlayın ve tork filtrelemesini kullanmayın. | ||
| PA2-64 | Frenleme eylemi zamanı | Gerçek zamanlı | 0 | 0.00~99.9 | Sec | ||
| PA2-65 | Geriye doğru direnç seçimi | Yeniden Başlat | 1 | 0~1 | Yenileme direnci bağlı olduğunda 1, bağlı olmadığında 0 değerini ayarlayın. | ||
| PA2-69 | Tespit edilen değerin üzerindeki sapma | Gerçek zamanlı | 15.0 | 0.1~100.1 | Rev | ||
| PA3-79 | Geriye doğru empedans değeri ayarı | Gerçek zamanlı | 30.0 | 3.9~160.0 | Ω | Yenileyici direncin değeri belirlenir. | |
| PA3-80 | Yeniden doğma empedans güç ayarı | Gerçek zamanlı | 40 | 1~5000 | W | Geriye dönük direnç kapasitesi ayarı | |
Kolay kurulum-ayarlama modu

| HAYIR. | İsim | İşlev |
|---|---|---|
| (1) | Eksen seçimi | Üzerinde çalışmak istediğiniz ekseni seçmek için tıklayın. |
| (2) | Otomatik ayarlama | Makine fabrikadan çıkmadan önce ayarlandığında, bu modda tahrik parametreleri belirlenebilir. |
| Yarı otomatik ayarlama | Yarı otomatik ayarlama modu; bazı parametreler sabit kalırken, bazı parametreler ince ayar yapılır. | |
| Manuel ayarlama | Tüm sürüş parametreleri sabittir. | |
| (3) | Değeri ayarla | Şu anda kullanımda olan ayarlanmış kazanç, atalet-tork oranı. |
| (4) | Hesaplanan değer | Mevcut hesaplamadan elde edilen değer. |
| (5) |  | Hesaplanan Değer içeriğini Ayarlanan Değere uygulayın. |
| (6) |  | "Değer Ayarla" alanının içeriğini "Hesaplanan Değer" alanına uygulayın. |
| (7) | Kaydetmek | Mevcut sürücü parametrelerini değiştirin ve kaydedin. |
Otomatik moddayken, bu arayüz üzerinden her eksenin ayar modunu değiştirebilir, atalet-tork oranını ve ayar kazancını düzenleyerek ayarlanan değerlerin çalışma etkisini gerçek zamanlı olarak gözlemleyebilir ve daha makul parametre ayarları bulabilirsiniz.
Otomatik ayarlama moduna alındığında, PA1-14 atalet-tork oranı parametresi gerçek zamanlı olarak ölçülür.
Otomatik ayarlama modunun temel işlevi, hata ayıklamanın başlangıç aşamasında uygun sürüş parametreleri bilinmediğinde, çalışma etkisine göre değeri otomatik olarak ayarlamaktır; bu işlem, çalışma etkisi iyi ve istikrarlı hale gelene ve atalet-tork oranı değeri sabit kalmaya başlayana kadar devam eder.
Çalışma etkisi stabil hale geldiğinde, yarı otomatik ayarlama moduna geçin, parametreleri manuel olarak ayarlayın, kaydedin, gücü kapatın ve parametreler etkili olmadan önce tekrar başlatın. Yarı otomatik ayarlama modunda, "atalet tork oranı" gibi ana parametreler sabit kalacak ve bazı servo parametreleri sorunsuz çalışmayı sağlamak için gerçek zamanlı olarak ayarlanmaya devam edecektir.
"Manuel Ayarlama Modu"na ayarlandığında, tüm servo parametreleri sabitlenir. Bu mod, ayarlanan parametrelerde yüksek derecede hassasiyet gerektirir.
Kolay Kurulum - Çentik Filtre Ayarı

| HAYIR. | İsim | İşlev |
|---|---|---|
| (1) | Eksen seçimi | Üzerinde çalışmak istediğiniz ekseni seçmek için tıklayın. |
| (2) | Uyarlanabilir filtreleme | Uyarlanabilir filtreleme fonksiyonunun AÇIK/KAPALI konuma getirilmesi. |
| (3) | Çentik filtreleme ile ilgili parametreler | Çentik filtreleme fonksiyonuyla ilgili çeşitli parametreler. |
Servo açıkken veya çalışma sırasında keskin bir ses duyulursa, adaptif filtre AÇIK konumuna getirilebilir; bu, mekanik rezonanstan kaynaklanan anormal sesi otomatik olarak ortadan kaldırır ve iki rezonans noktasını giderebilir. Rezonans frekansı 4000 olarak ayarlandığında, rezonans noktası yoktur.
Kolay Kurulum - Titreşim Kontrol Ayarı
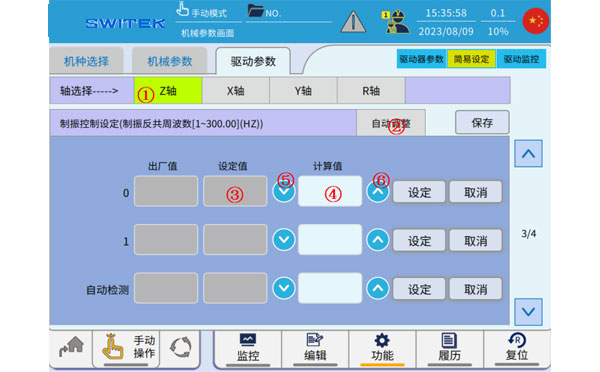
| HAYIR. | İsim | İşlev |
|---|---|---|
| (1) | Eksen seçimi | Çalıştırmak istediğiniz ekseni seçin. |
| (2) | Otomatik ayarlama | Ayarlanan titreşim kontrolünün ilgili parametreleri otomatik olarak algılanır. |
| (3) | Değeri ayarla | Şu anda kullanımda olan titreşim kontrol parametreleri. |
| (4) | Hesaplanan değer | Elde edilen sayısal değeri hesaplayın. |
| (5) | | Hesaplanan Değer içeriğini Ayarlanan Değere uygulayın. |
| (6) | | "Değer Ayarla" alanının içeriğini "Hesaplanan Değer" alanına uygulayın. |
Titreşim kontrol ayarı: Durma anında titreşimi bastırmada etkilidir ve genel ayar değeri 5-10 arasındadır. Ayar değeri tork dalga formuna göre kısaca hesaplanabilir ve ilk seferde doğru şekilde ayarlamak zordur.
Kolay Kurulum - Çarpışma Algılama

| HAYIR. | İsim | İşlev |
|---|---|---|
| (1) | Eksen Seçimi | Ayarlanacak eksen seçimi |
| (2) | Maksimum tork değişimi |


Contact SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, Çin
HuangYanZheng©Copy Right





