
sales06@switek.biz

+86 186 5927 5869

Shopping

Subscrib to Us
sales06@switek.biz
+86 186 5927 5869
Shopping
Subscrib to Us
To have the robotic arms running is a cooperation of the control system and the mechanical structure and the electric board is the medium between the control system and the mechanical structure of the robotic arms. Here in this chapter we'll discuss the definition of the ports of the boards installed in a robotic arms.
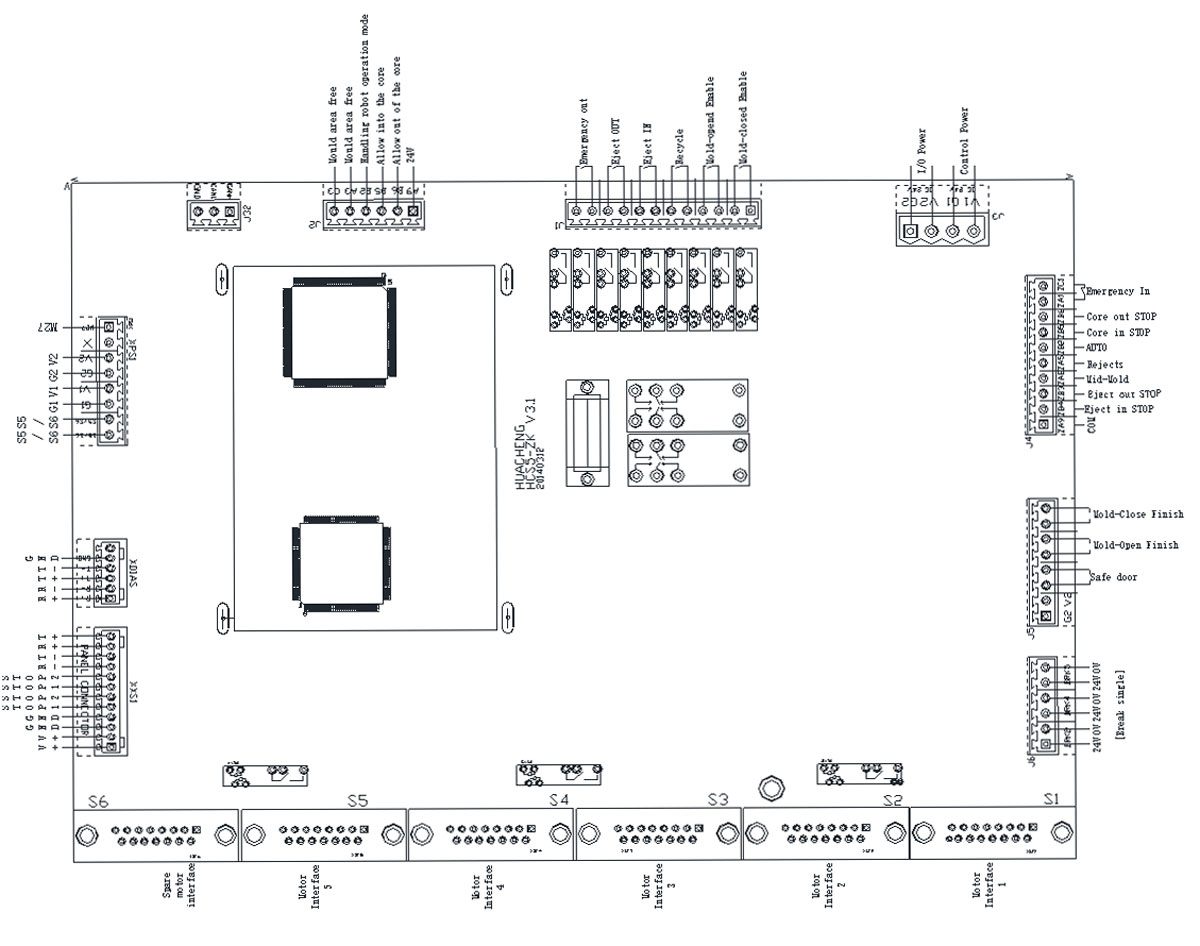
The drawing above are the ports definition of the main board of SWITEK 5 axis servo injection robotic arms.
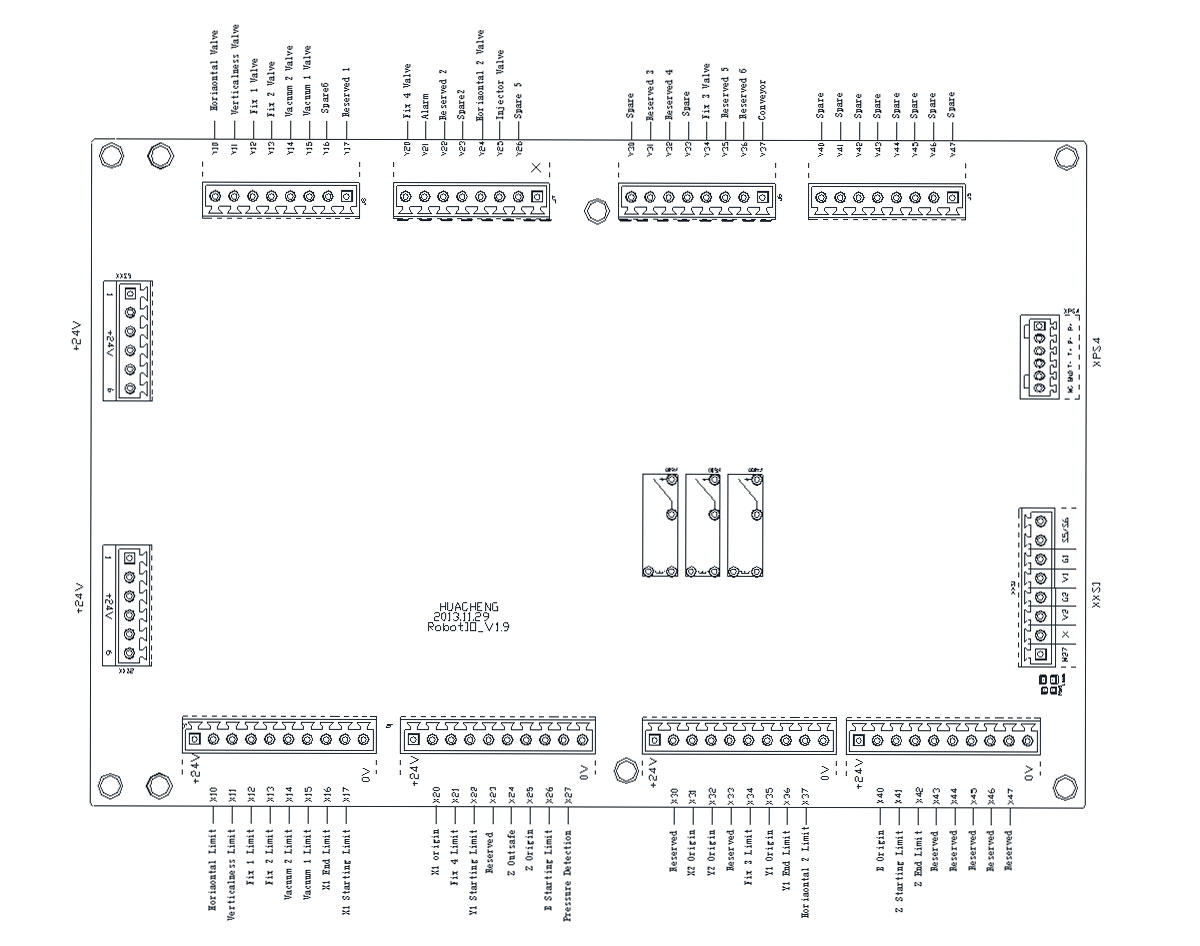
The drawing above are the ports definition of the I/O board of SWITEK 5 Axis servo injection robotic arms.
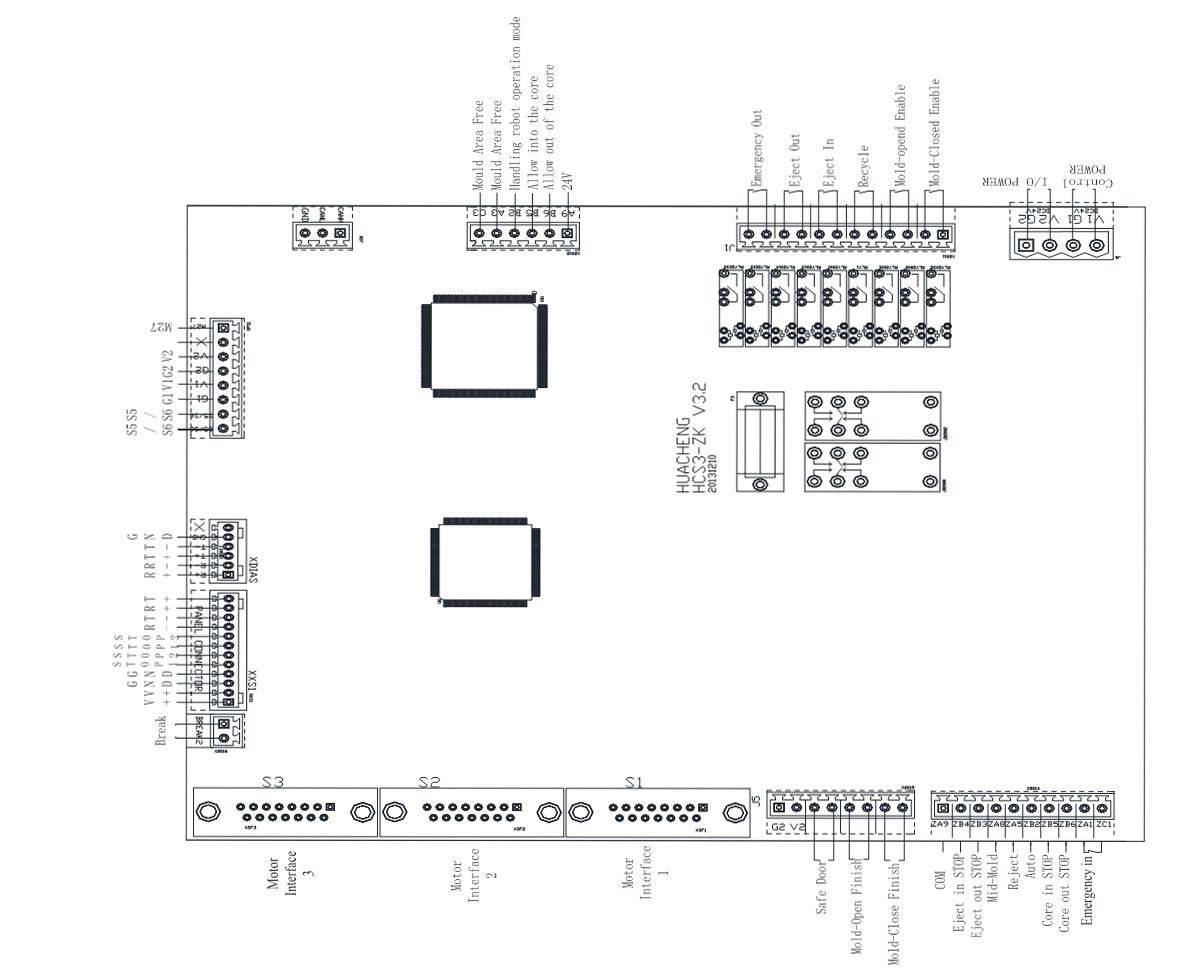
The drawing above are the ports definition of the main board of SWITEK 3 Axis servo injection robotic arms.
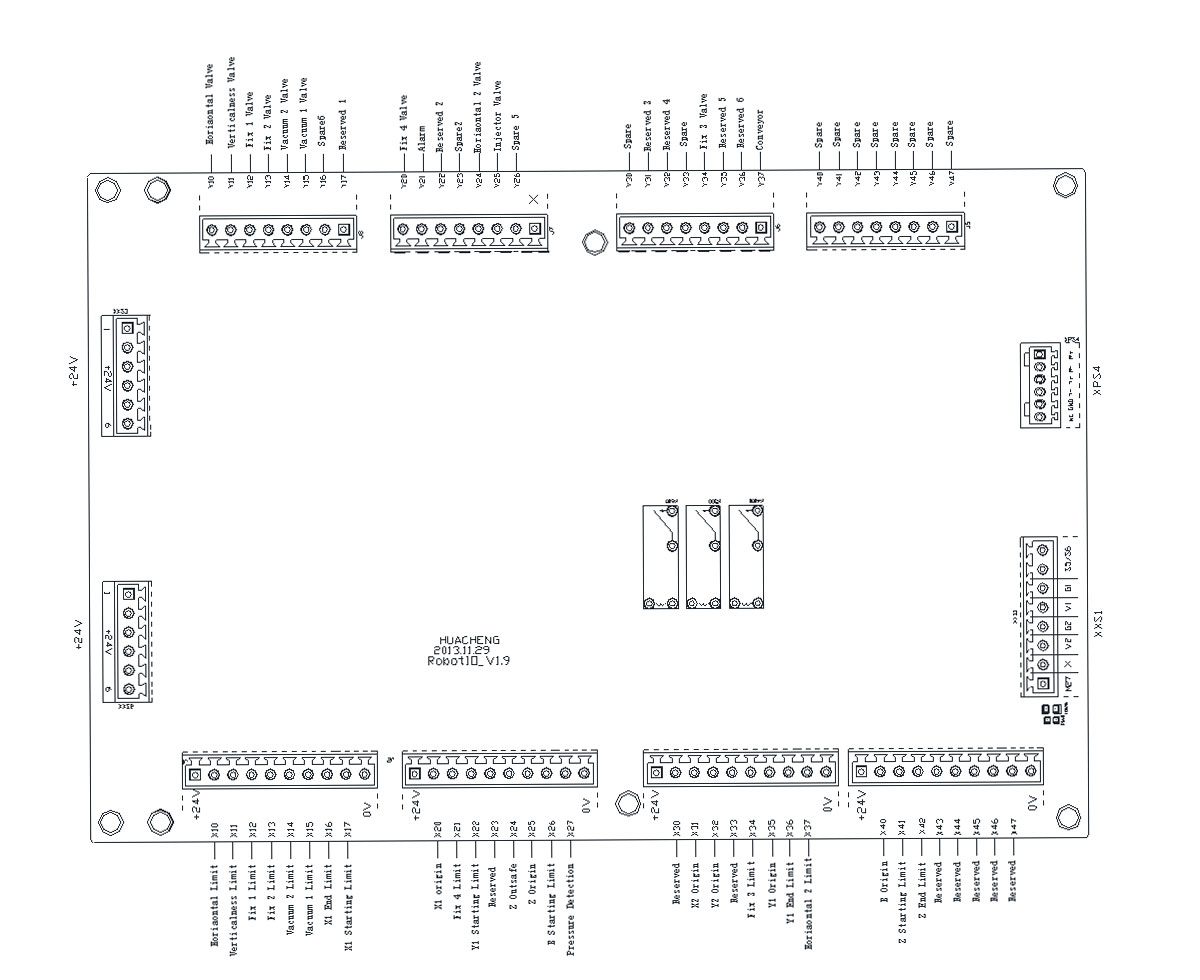
The drawing above are the ports definition of the I/O board of SWITEK 3 Axis servo injection robotic arms.
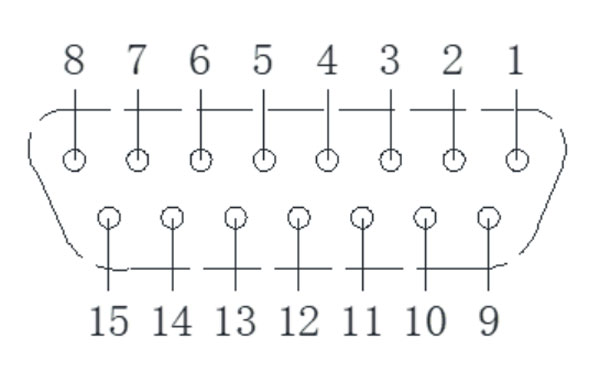
| Pin No. | Terminal Definition | Pin No. | Terminal Definition |
|---|---|---|---|
| 1 | +24V | 9 | 0V |
| 2 | OA+ | 10 | P+ |
| 3 | OA- | 11 | P- |
| 4 | OB+ | 12 | BRAKE |
| 5 | OB- | 13 | N+ |
| 6 | OZ+ | 14 | N- |
| 7 | OZ- | 15 | ALM |
| 8 | SON | 15 |


Contact SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right






